2.4.1.1.2 Elastische Schwingungen und Wellen im Stab
Kann man die elastischen Schwingungen eines Stabes so berechnen, dass man seine „Töne“ und „Obertöne“ direkt ermittelt? Solche Stäbe sind ja als Bauteile von Musikinstrumenten in abgewandelter Form bekannt: Xylophon, Triangel, ja selbst die alte Stimmgabel gehört dazu, und auch in der Mundharmonika schwingen Metallplatten.
Zuerst muss man sich sicherlich die Ziele genauer formulieren, damit man schrittweise vorgehen kann. Wie man weiß, bin ich zu faul für eine große Zahl analytischer Tricks, um die dazugehörigen Differentialgleichungen zu lösen. Lieber nehme ich die Gleichungen als solche zum Ausgangspunkt für numerische Berechnungen. Das hat sich auch beim Finden statischer Strukturen wie gebogener Federketten und gebogener Federflächen (siehe weiter unten unter 2.4.2.1) bewährt, die dynamisch als zeitlicher Endpunkt einer gedämpften Bewegung hin zum Gleichgewicht verstanden worden sind.
Hier wird es etwas komplizierter, weil vielfältiger. Ein Stab kann dreierlei Schwingungen ausführen:
– Longitudinal-Schwingung (Dehnung)
– Transversal-Schwingung (Biegung)
– Torsions-Schwingung (Drillung)
Der Stab kann verschieden eingespannt sein (durch Lager unterschiedlicher Freiheitsgrade):
– gar nicht
– einseitig am Ende
– zweiseitig an den Enden
– einfach oder mehrfach zwischen den Enden
Der Stab kann eine unterschiedliche Querschnitts-Geometrie haben.
Und vor allem kann die Startsituation (Anschlag) völlig verschieden sein:
– einzelner Schlag (Stoß) an einem bestimmten Ort
– rhythmische oder zufällige Stöße
– zeitliche Schwingung an einem bestimmten Ort eine bestimmte Zeit
– örtliche Schwingungs-Start-Auslenkung über den gesamten Stab
Dabei sollen variiert werden können:
– Anzahl der diskretisierten Einzel-Schwinger als Bauelemente des Stabs
– „Federkonstante“ zwischen ihnen
– Abstand zwischen ihnen
– Masse von ihnen
– äußere Zusatzkräfte (Schwerkraft z.B.)
Zusätzlich muss noch Einfluss genommen werden können durch Variation von
– Dämpfung (evtl. notwendig gegen numerischen Artefakt des „Aufschwingens“)
– Zeittakt (Test, ob Artefakte vorliegen)
Trotzdem soltle man davon ausgehen dürfen, dass selbst bei unterschiedlichen Start-Konfigurationen die gleichen Frequenzen vorkommen, nur anders spektral gemischt. Deshalb ist es didaktisch und aus Fehler-Fortpflanzungs-Gründen sinnvoll, vom Einfachen zum Komplizierten vorzugehen, um jederzeit den Kontakt zur Plausibilität der Ergebnisse beibehalten zu können. Das bedeutet auch methodisch, erst einige Proberechnung in einer EXCEL-Tabelle vorzunehmen, bevor man zu einer Steigerung durch VBA-Programme im Hintergrund kommt oder sogar auf ein animiertes Modell umsteigt.
Einfachster Start mit Überlegungen, die schon an anderer Stelle gemacht worden sind:
Wir nehmen eine longitudinale Diskretisierung eines elastischen Stabes als „Federkette“ vor. Lassen wir diese Kette senkrecht hängen, setzen sie also der Schwerkraft aus, so lässt sich die Dehnung jeder Feder leicht unmittelbar berechnen (auf jede wirkt nur die Summe der unter ihr hängenden Massen) und kann also als Probe für unsere dynamisch (über numerische Zeit-Integration) ermittelte Gleichgewichtsform dienen. Hier kann man sogar noch weiter abrüsten und die Schwerkraft schrittweise auf Null reduzieren. Dann müssten alle Federn in der kraftfreien Länge vorliegen. Damit sich das System „aus der Schwingung in die Gleichgewichtslage“ beruhigen kann, wird noch eine verstellbare Dämpfung eingebaut. Die Massen selbst kann man („ohne Einschränkung der Allgemeinheit“ nur im 1-dimensionalen Fall!) als Punktmassen annehmen.
Aber zuerst muss einmal das Modell richtig aufgebaut werden, mit einer Prinzip-Skizze und mit mathematischen Ansätzen. Das muss dreimal erfolgen, weil wir ja drei verschiedene Schwingungs-Typen erforschen wollen. Anschließend steigern wir uns bei kokreten Umsetzungen des Modells in Algorithmen für die Berechnungen.
I. Longitudinal-Modell
Am einfachsten ist wohl der quasi eindimensionale Fall, die Longitudinal-Schwingung (wenn man keine Einschnürung des Stabes bei der Dehung berücksichtigt):
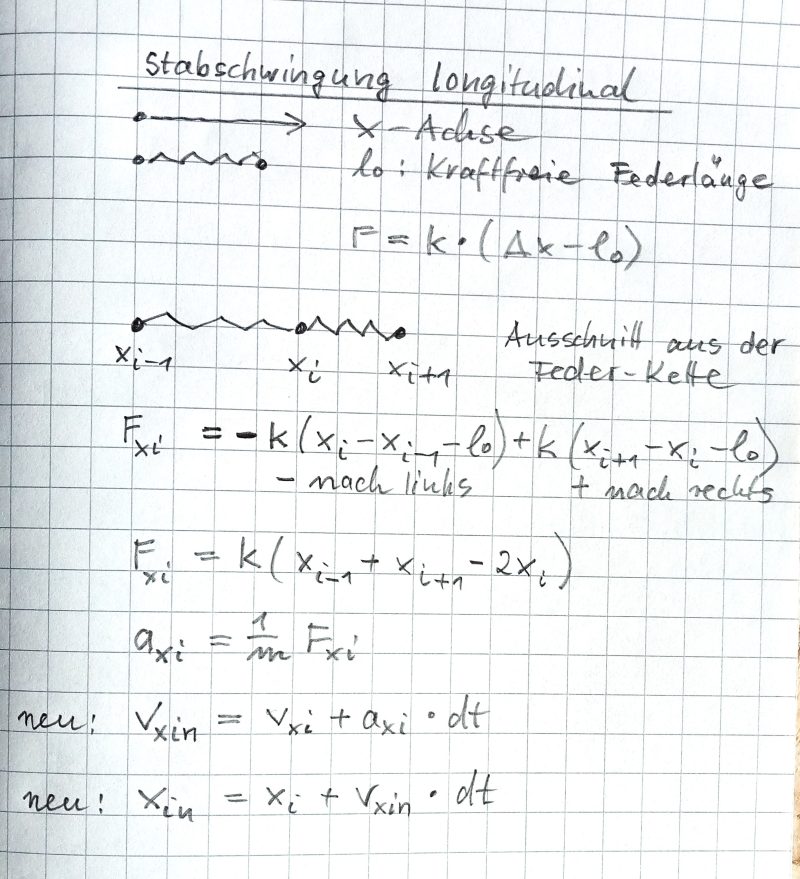
Wir gehen also davon aus, dass jede Masse nur zwei Nachbarn hat, mit denen sie über Federn verbunden ist. Mit dem proportionalen Ansatz zur Federkraft (Federkonstante k) kann man bei Schraubenfedern von einer kraftfreien Länge lo ausgehen und jeder Abweichung von dieser Länge proportional eine Kraft zuordnen, die sowohl anziehend als auch abstoßend sein kann (Vorzeichen!).
Aus der Kraft folgt mit der Masse eine Beschleunigung (Newton!), welche die Geschwindigkeit ändert, welche wiederum den Ort der Masse verändert.
Die Funktions-Gleichung zur Kraftermittlung enstpricht mathematisch der Ermittlung der analytischen Krümmung einer Funktion (zweite Ableitung).
Die reine Bewegungsgleichung enthält also sowohl die zweite Ortsableitung als auch die zweite Zeitableitung der lokalen Auslenkung aus der Gleichgewichtslage des geraden Stabes und sieht für die freie Schwingung ohne Einspannung und Zwangskraft so aus:
d²x/dx² + C*d²x/dt² = 0
II. Transversal-Modell
![]()
Jetzt haben wir näherungsweise vorausgesetzt, dass die gesamte Saite eine konstante Längs-Spannung hat (alle Massen sind in Längsrichtung gleich weit voneinander entfernt) und dass die Auslenkung in die y-Richtung nur zu kleinen Winkeln führt. Dann haben wir es wieder mit linearen Gleichungen zu tun. (Die Grenzübergänge für die Pythagoras-Wurzeln oder Winkelfunktionen kann man in der Standard-Literatur nachlesen.)
Das Ergebnis ist bis auf den Proportionalitäts-Faktor das gleiche wie bei der Longitudinalschwingung. Wir werden also mit hoher Wahrscheinlichkeit ein ähnliches Frequenzspektrum der Schwingungen erhalten!
Allerdings: Wir haben hier die eigentlich vorliegende geometrische Krümmung durch die analytische ersetzt, was, wie eingangs erwähnt, nur für die Näherung kleiner Winkel gültig ist.
(Zur Erinnerung: Der Kreis hat eine geometrisch konstante Krümmung, die Parabel eine analytisch konstante Krümmung. Beide sehen sehr unterschiedlich aus, wenn man sich weit genug vom Scheitel der Parabel entfernt.)
III. Biege-Modell
Jetzt wird es etwas komplizierter, da wir für die benachbarten Winkel der Spiralfedern die jeweiligen Nachbarn noch außerdem mit einbeziehen müssen, wodurch statt dreier Masssen-Positionen jetzt fünf erscheinen:

Die Gleichung enthält nun einen modifizierten Proportionalitätsfaktor (der Bezug zur Basislänge der berechneten Dreiecke ist darin sowie die Trägheitsterme Dichte und Querschnittsfläche sowie die Kraftterme E-Modul und Flächenträgheitsmoment) und fünf Koordinaten in unterschiedlicher Wichtung. Das ist die mathematische Formel für die Berechnung der vierten Ableitung, also der analytischen Krümmung der analytischen Krümmung (deshalb drei Klammern mit je drei Termen). Die Bewegungsgleichung hat sich also geändert und sieht für die freie Schwingung nun so aus:
d4x/dx4 + C*d²x/dt² = 0
(In dem C stecken wieder u.a. Elasitizät und Biegesteifigkeit des Stabes reziprok drin.)
(Übrigens 1: Die obigen drei Ansätze gelten nur für solche Massen, die sich nicht am Ende der Kette oder in einer Einspannung befinden. Für die anderen Massen muss man die entsprechenden Randbedingungn berücksichtigen, worauf hier jetzt nicht eingegangen werden soll.)
(Übrigens 2: Man kann immer eine zusätzliche Kraft (Schwerkraft z.B.) in die Beschleunigungs-Gleichungen aufnehmen. Deren Wirkung sieht je nach Richtung der Kraft und Schwingungs-Variante unterschiedlich aus:
Mit Schwerkraft ergibt sich dann die y-Komponetne der Beschleunigung zu:
ay(i) = -1/m*(C*(+0,5*y(i-2) – 2*(i-1) + 3*y(i) – 2*y(i+1) + 0,5*y(i+2))+Gy)
Das ist immer noch die numerische Berechnung einer analytischen Krümmungs-Änderungs-Änderung, also der vierten Ableitung nach x. Das ist kein Wunder, wenn man weiß, dass die Biegelinie ihrerseits umgekehrt das vierfache Integral der Kraftverteilung/Linienlast ist. Über die Zeitintegration können wir also davon ausgehen, dass sich bei einer leichten Dämpfung die aus der Statik bekannte Biegelinie (siehe dort!) ergeben muss, falls wir eine Erdbeschleunigung berücksichtigen. Das ist ein guter Test für das Modell, wovon hier schon im Vorgriff ein ästhetisches Einschwingen gezeigt werden soll:

Bewegung der einzelnen Massen

Entwicklung der Stab-Form
Tatsächlich biegt sich der einseitig eingespannte Stab unter Einfluss der Schwerkraft mit der Zeit zur bekannten Biegelinie! (Details siehe im Unter-Abschnitt 2.4.1.1.2.2!)
Testweise Umsetzung der Modellierung
(Die ausführlichen Modelle und ihre Ergebnisse folgen in den Unterpunkten 4.2.1.1.2.1 undd 4.2.1.1.2.2 dieses Abschnitts.)
Mit der longitudinalen Schwingung „experimentieren“ wir nun gleich los.
Schrittweiser Aufbau des in der Zeit bewegten Modells
A: 1 Masse und 1 Feder (Feder am Gestell befestigt)
Am besten testet man das mit einer einzigen Masse an einer einzigen Feder, dann mit zwei Massen und dann mit drei und dann mit „vielen“, also erst einmal z.B. 15. Was wird „getestet“? Ob ein „Nicht-Gleichgewichts-Zustand“ dynamisch in einen Gleichgewichts-Zustand übergeht, der identisch mit der einfachen statischen Berechnung ist.
Und dann testet man gleich noch mit, ob die Schwingungsfrequenz der erwarteten entspricht, nämlich der aus der Schwingungsgleichung (siehe dort) folgenden.
Ich habe vorerst 2000 Integrationsschritte vorgesehen, habe die Schrittweite so eingestellt, dass reichlich anderthalb Schwingungen stattfinden können, habe einen Startpunkt (also eine Federlänge) und eine Startgeschwindigkeit der Masse an diesem Ort festgelegt (das sind in der Sprache der Integralrechnung die Anfangsbedingungen zur Lösung der Differentialgleichung) und dann beobachtet, was mein „EXCELperiment“ so ergibt. Die Masse soll 1 sein, die Federkonstante auch 1. Theoretisch ergäbe sich eine Kreisfrequenz von
w² = k/m = 1
also eine Periode von 2*pi = 6,28318531. (Alle Einheiten 1 gesetzt.)
Die aus dem Diagramm abzulesende Periode ist etwa 6,3, die Tabellen-Interpolation ergibt etwa 6,28318021, also überraschend hypergenau.

Schwingung einer Einzelmasse ungedämpft
Die Fourieranalyse ist etwas problematisch, weil nur wenige Perioden vorliegen, aber wenn man den Startwinkel einigermaßen berücksichtigt, kommt man händisch* in der EXCEL-Tabelle ebanfalls auf w=1,00, also auf einen Fehler unter 1%.
(„Händische“ Fourier-Analyse besagt hier, dass man eine Vergleichs-Schwingung mit variabler Kreisfrequanz und Phase ansetzt, mit der gemessenen Schwingung zu jedem Zeitpunkt multipliziert und die Summe der Produkte bildet. Wird diese im Betrag maximal, hat man die „richtigen“ Werte der gemessenen Schwingung ermittelt.)
Vergößert man die Federkonstante auf 100, so erhält man die zehnfache Frequenz:

Gleiche Masse mit 100-facher Federkonstante
Hier ergibt die Fourier-Analyse ebenfalls wie im Diagramm und im Daten-Ansatz ein w=10,0. Die Start-Winkel-Abhängigkeit ist schon deutlich reduziert, weil der Rest-Anteil der nicht ganz ausgeführten Schwingung relativ zur Gesamtzeit gesunken ist.
Auch die Veränderung der Amplitude oder der Phase durch andere Anfangsbedingungen (durch Startpunkt und Startgeschwindigkeit) ändert nichts an der Frequenz der Schwingung (die der hauptsächliche Untersuchungsgegenstand in diesem Abschnitt ist), wie man aus der Theorie erwarten durfte.
Was aber passiert durch Hinzufügen einer Schwerkraft, die in Richtung der Feder wirkt, also die Eindimensionalität der Anordnung nicht verändert? Die Theorie sagt, dass dadurch lediglich der Gleichgewichtspunkt der Schwingung nach unten verschoben wird, weil der lineare Ansatz für die elastische Kraft den Charakter der Größe „Ort“ als intervallskaliert nicht ändert. Prüfen wir es:

Durch Schwerkraft nach unten verschobene Schwingung
In der Tat zeigt auch die Prüfung mittels Fourier-Analyse für die Frequenz keine Änderung (wie schon der Augenschein des Diagramms vermuten lässt)!
Für komplexere Schwingungszustände, wie sie in der Zukunft unserer Modell-Erweiterung zu erwarten sind, werden wir also einen Algorithmus für das automatische Durchfahren der Test-Frequenz erstellen, in dessen Ergebnis ein Frequenzspektrum entstehen soll, das die Grundschwingung und die Obertöne darstellen kann. Bis dahin wollen wir aber erst einmal das mechanische Modell schrittweise erweitern:
B: 2 Massen an 2 Federn (eine Feder am Gestell fest)
Ein willkürlicher Set von Anfangsbedingungen (beide Startorte und beide Startgeschwindigkeiten der gleich großen Massen an gleichen Federn) zeigt sofort ein viel komplexeres Bild (jetzt sind statt 2000 Zeitschritten 8000 gewählt, um die Feinheiten besser darstellen zu können):

Schwingung zweier oben bei x=0 aufgehängter Massen ohne Schwerkraft
Man ahnt mit etwas „Seh-Erfahrung“, dass hier zumindest zwei Frequenzen überlagert sind. Man ahnt außerdem, dass man beide durch geeignete Anfangsbedingungen einzeln erzeugen kann: gleichgerichtete und entgegengerichtete Startwerte. Prüfen wir diese Hypothese:

Parallelschwingung zweier Massen

Schwingung zweier Massen bei antiparallelem Start
Zählt man einfach die Zahl der Schwingungen in der gleichen Zeit, erkennt man, dass knapp 8 Schwingungen in 80 s parallel etwa 20,5 Schwingungen antiparallel gegenüberstehen. Bleibt das Frequenzverhältnis auch bei veränderten elastischen Werten (Masse oder Federkonstante) bestehen 8wegen des linearen Ansatzes sollte man davon ausgehen können!)?
Richtig! Bei Verdopplung der Federkonstante sind es 11 gegen 29 Schwingungen, bei Vervierfachung 15,7/41, also genau doppelt so viele wie oben, was theoretisch zu erwarten war. Woher kommt aber das eigenartige Verhältnis von etwa 2,6 zwischen beiden Frequenzen? (Müssen wir später untersuchen, wenn wir weitere Massen hinzunehmen.) Und: Wird es durch die Schwerkraft verändert?

parallel schwer

Das Frequenzverhältnis ist das gleiche wie im schwerkraftfreien Fall.
Der allgemeine Fall mit Schwerkraft und Dämpfung (zur Prüfung des Gleichgewichts-Falls) sieht dann so aus:

Allgemeiner Fall ausgeschwungen, das Frequenzverhältnis der beiden Hauptschwingungen ist hier 1,33. Die schwerkraftfreien Positionen bei 2 und 4 sind proportional verschoben um 1 zu nun 3 und um 1+1/2 zu nun 5,5, wie es theoretisch vorausgesagt werden kann.
Richtig zufrieden darf man aber erst dann sein, wenn man auch den umgekehrten Modellierungsfall als Probe absolviert hat: Fourier-Synthese der aus dem Spektrum gefundenen Frequenzen zum Gesamtbild der Schwingung. Dazu kann man die „händisch“ ermittelten Frequenzen in Amplitude und Phase schrittweise (wiederum „händisch“) ändern, um das Gesamtbild möglichst genau zu „komponieren“.
Machen wir einen Versuch für die Masse m2, die unten an der Masse m1 hängt:

2 Massen schwer aneinander

Synthese der unteren Schwingung (Masse 2) aus den 2 ermittelten Schwingungen durch Probieren angenähert
Bis auf die Feinheit des Starts (Phase) sind die beiden Bilder überraschend ähnlich geworden, was man durch viel Arbeit noch ein wenig verbessern kann. Aber die Haupt-Hypothese ist bestätigt: Man kann aus zwei Grundschwingungen die chaotisch erscheinende Überlagerung tatsächlich synthetisieren, was im Umkehrschluss bedeutet, dass die Originalschwingung im wesentlichen nur aus zwei Komponenten besteht.
C: 2 Massen an 1 Feder (frei schwebend miteinander verbunden: „Hantel“)
Wie würde denn ein Hantel aus 2 identischen Massen, verbunden durch eine einzige Feder, schwingen, wenn ihr Schwerpunkt der Koordinatenursprung ist?
Ich habe mich lange gewundert, welche Massen ich bei gleicher Federkonstante einstellen muss, um auf die gleiche Frequenz der Gegen-Schwingung (einzige mögliche Schwingungsform) zu kommen:

Eine Masse (m=1) über Feder an Gestell

Zwei Massen als freie Hantel (jeweils m=2)
Wie kann man das erklären? Man sollte doch denken, dass im Fall zweier Massen nur jeweils m=1/2 stehen müsste, weil beide Massen dann zusammen so schwer wie die eine links wäre?? Denn schließlich sind in beiden Fällen identische Federn eingesetzt!
Ob der Energiesatz helfen kann?
Die potentielle Energie, die in einer Feder gespeichert ist, ist
Epot = (k/2) * x²
k und maximale Dehnung sind in beiden obigen Fällen gleich eingestellt, also sind auch beide Epot identisch. (Die Frequenz ist übrigens unabhängig von der Amplitude, wie wir schon wissen… Aber für die Energie-Betrachtung über den Vergleich der beiden Fälle benötigen wir der Einfachheit halber identische Werte von der Dehung x!)
Im entspannten Zustand der Feder ist ihre Energie völlig in die kinetische Energie der Massen übergegangen:
links: Ekinl = (ml/2)*vl²
rechts: Ekinr1 = Ekinr2 = (mr/2) * vr²
Ekinr = Ekinr1 + Ekinr2 = mr * vr² = 2ml * (vl/2)² = (ml/2)*vl² = Ekinr
Da bei der Gegenbewegung zweier Massen nur von jeder der beiden der halbe Weg zurückgelegt werden muss, um die Feder zu entspannen, liegt auch nur die halbe Geschwindigkeit vor (vr= vl/2), was beim Quadrieren ein Viertel ergibt. Verdoppelt man jede Einzelmasse, ist das ausgeglichen (mr=2*ml) – fertig ist die Lösung des Rätsels.
D: 3 Massen an 3 Federn in Reihe
Ob es einen qualitativen Unterschied zu 2 Massen gibt?

Parallele Start-Ausdehnung aller drei Federn mit der gleichen Kraft (Zugkraft ohne Schwerkraft)
Es fällt auf, dass die am Gestell befestigte Masse Oberschwingungen zeigt, die die unteren weniger aufweisen. Das könnte eine numerische Fortpflanzung sein, sozusagen eine „unechte Schallgeschwindigkeit“. Das ließe sich mit Veränderung des Zeittakts prüfen:

Hier wurde also nicht das Diagramm gedehnt, sondern wirklich, der Zeittakt geviertelt, die Anzahl der 8000 Takte also nicht verringert. Da alle drei Massen aus der Ruhe gestartet worden sind, handelt es sich also nicht um einen sogenannten „Artefakt“.
E: 7 und mehr Massen an Federn in Reihe
Wir erhöhen die Massen-Anzahl und sehen, was passiert:

Paralleler Ruhestart von 7 Massen

15 Massen aus der Ruhe parallel
Es bestätigt sich der Eindruck, dass die mittleren Massen einer harmonischen Schwingung am nächsten zu sein scheinen, während die äußeren Massen „Randeffekte“ zeigen. Bei genauerem Hinsehen haben wir aber unten eine Dreieck-Schwingung und in der Mitte eine Trapez-Schwingung!
Hier lohnt es sich also, weiter zu spielen! Aber mit welchem Ziel??
Am Ende wollen wir Töne und Obertöne ermitteln. Dazu machen wir vorerst noch „Extrembeispiele“ von Konfigurationen, um gemischte Beispiele dann besser interpretieren zu können.
Zuerst entkoppeln wir die Kette vom Gestell und ziehen sie auseinander, um zu sehen, ob wir sie gegeneinander schwingen lassen können. Das klappt:

Freie Gegenschwingung mit kleinen Zappeleien,
Danach probieren wir es mit einem Schlag gegen die letzte (untere) Masse, wir setzen sowohl die Startposition als auch eine Startgeschwindigkeit nach innen oben):

Fortpflanzung eines Schlags gegen das freie Stabende
Wir erkennen, dass eine Welle durch den Stab läuft, am festen Ende reflektiert wird und zurück läuft. Mit etwas Phantasie erkennt man auch am freien Ende eine Reflexion. Um die Frage beantworten zu können, ob das ein numerischer Artefakt der Taktzeit ist, ändern wir diese und vergleichen die Laufzeit der Welle (oben hin und zurück in etwas mehr als 5 s):

Schlag gegen freies Ende bei veränderter Taktzeit
Erfreulicherweise haben sich weder Laufzeit (reichlich 5 s) noch interne Zappel-Schwingungs-Frequenz geändert, was eindeutig dafür spricht, dass beide Effekte keine Artefakte sind. (Bei 8000 Takten hätten Artefakte auch ganz anders aussehen müssen…)
Wir haben es hier also mit einer Art „Schallgeschwindigkeit“ zu tun, die der Ausbreitung der Scdhlag-Verformung zugrundeliegt. Würde denn eine Änderung der Federkonstante diese Geschwindigkeit (oben 56cm/5s = 11cm/s) beeinflussen?

k=4 statt k=1
Da lacht das Herz des EXCELperimentators! Tatsächlich hat sich die Schwingzeit bei Vervierfachung der Federkonstante (theoriekonform!) halbiert und damit die „Schallgeschwindigkeit“ verdoppelt! (Auch die Zappeleien – eine Art „thermische Schwingungen“ – sind natürlich doppelt so schnell.) Das Modell scheint also nicht ganz falsch zu sein!!!
Die Frage ist jetzt also, ob die durchlaufende Welle genutzt werden kann, um eine „Ton-Frequenz“ des Stabes zu erklären?
Zuerst ändern wir die Einspannung: jetzt beidseitig. Der Schlag (soll longitudinal sein, was technisch schwierig ist) erfolgt jetzt in der Mitte des Stabes:

Mittiger Schlag bei beidseitiger Einspannung
Die Welle breitet sich nun in beide Richtungen aus und überlagert sich am besten in der Mitte des Stabes abwechselnd auslöschend und „kabbelig“ nach jeweils etwa 2,5 s. Auch hier also die gleiche „Schallgeschwindigkeit“. Das sich das Geschehen mit der Zeit chaotisch zu entwickeln scheint, liegt an der unsymmetrischen Versuchsanordung beim Start. Man müsste zwei innere Massen bei einer insgesamt geraden Anzeahl gegeneinander starten lassen. Bei 15 Massen etwa so: (eine chaotische Entwicklung sollte also trotzdem erscheinen…)

Doppelschlag in der Mitte
Perfekt! Die ungleiche Anzahl der „Rand-Massen“ wirkt langsamer als der unsymmetrische Schlag vom obigen Versuch!
Was passiert bei einem Stab OHNE Einspannung?

Freier Stab mit symmetrischem Mitte-Schlag
Jetzt fehlen die äußeren Federn als Verbindung zum Gestell, weshalb die Laufzeit (bei gleicher Schallgeschwindigkeit) kürzer wird. Die äußeren Massen schwingen etwas weniger, im Inneren ist wenig Unterschied zu merken.
Da eine Energie-Aufnahme des Gestells nicht im Modell enthalten ist, wirkt es also nicht dämpfend, sondern nur reflektierend. Sein Fehlen verlegt also die Stärke (Amplitude) der ehemals äußeren Schwinger „in nullter Näherung“ eine Position nach innen, wie man am Diagramm etwa erkennen kann.
Ein Ansatz für „Oberwellen“ ist bei der bisherigen Versuchanordnung im Ansatz zu erkennen, wenn man erklären kann, wie man einen Stab in der Mitte zu Longitudinalwellen anregt. Durch einen schrägen Schlag bei gutem Reibungskoeffizienten etwa? Ein longitudinale Komponente sollte er haben! Probiert es mit einem Holzstab aus! (Es wird schwierig sein, die Töne einzeln zu hören, aber die Klangfarbe unterscheidet sich deutlich zwischen Schlag aufs Ende und schrägem Schlag auf die Mitte!)
Beim einseitig eingespannten Stab könnte eine gute Obertonwelle entstehen, wenn der Anschlagort so gewählt wird, dass die Reflexion am „festen“ Ende der Einspannung im Gestell und am „losen Ende“ zu einer Überlagerung wiederum am Anschlagsort führt. Das könnte man händisch pröbeln!

1 Schlag bei 8/15, Schwebung etwa 12,5 s

Schlag bei 10/15, keine gute Schwebung als „Oberton“ zu erkennen

Doppelschlag bei 2/3, also bei Massen 10 und 11 von 15: mit deutlicher Schwebung bei etwa 4,5 s; also etwa der knapp dreifachen Frequenz des Mittelschlags.

1 Schlag 10/15 mit T etwa 10s

Doppelschlag mit zwei Schwebungen

chaotisch wirkender Doppelschlag an Neben-Position

Ein 3-fach-Schlag zeigt neue Strukturen kurzer und langer Schwingzeit – schwer auswertbar…
Wir müssen also konstatieren, dass Oberwellen und Schwebungen auftreten können, aber das Modell dafür offenbar noch zu grob ist. Deshalb besteht die Aufgabe, es mit mehr algorithmischer Akribie zu verfeinern.Das wird schrittweise in den Unterpunkten zu diesem Abschnitt erfolgen, und zwar für jeden der drei Schwingungstypen getrennt. Man darf also auf die dann mehr professionell angehauchten Ergebnisse gespannt sein!
Kommentar abgeben