2.10.1.1 Wellen
Kann man Wellen einfach modellieren?
Man spricht ganz einfach und ungezwungen von „Wellen“, weil man sie ja aus der Praxis von Kindesbeinen an kennt und liebt. Man kann sie blumig beschreiben und jeder versteht es.
Wenn man sie aber definieren soll, wird es schon etwas komplizierter. Wir haben das schon bei der Schwingung gesehen, dass es anfangs ganz einfach ist und dann aber doch komplizierter werden kann (bis hin zu mehrdimensionalen „Trajektorien“ in den Abschnitten des Themas 2.8).
Als „Welle“ könnte man im mechanischen Sinne etwas bezeichnen, was sich als „Struktur“ fortbewegt, ohne dass sich die die Struktur bildenden Teilchen selber fortbewegen. Fangen wir damit einfach an:
SCHRITT 1
Wir stellen uns als allereinfachstes Modell einer Transversalwelle Teilchen vor, die in einer Raumrichtung linear angeordnet sind und sich senkrecht zu dieser Richtung bewegen können (z.B. auf „Schienen“, damit sie diese senkrechte Richtung nicht verlassen). Jedes dieser Teilchen könnte theoretisch mit der Grundlinie elastisch verbunden sein und somit – ohne Kopplung mit den Nachbarn – ganz für sich eine harmonische Schwingung ausführen. Das hatten wir schon in den „Naturwissenschaftlichen Grundlagen“ und hatten „nebenbei“ Pi gefunden.
Wenn wir aber die Teilchen nicht mit der Grundlinie, sondern miteinander elastisch verbinden, so können sie untereinander Kräfte und also Bewegungen übertragen, die vom Grundlinienabstand unabhängig sind. Da wir es uns maximal leicht machen wollen, setzen wir eine lineare Kopplungsfunktion an, bei der wir außerdem nur die Kraftkomponente senkrecht zur Grundlinie betrachten (Teilchen bewegen sich ja auf „Schienen“!).
Mathematisch bedeutet das, dass wir ein Beschleunigung der einzelnen Masse proportional zur resultierenden Kraft aus den beiden Nachbar-Wechselwirkungen ansetzen und das von Takt zu Takt kumulieren („numerisch integrieren„). Physikalisch ist das ein proportionales Gleichsetzen von zweiter Ortsableitung („Krümmung“ der Massenanordnung) und zweiter Zeitableitung des einzelnen Massenortes („Beschleunigung“). (Da ist also ganz nebenbei der Kern der „Wellengleichung“ entstanden!)
Dann lenken wir ungefähr in der Mitte der Anordnung (mit Hilfe einer einmalig aufgeprägten äußeren Kraft) einige Teilchen aus ihrer Startporision von der Grundlinie aus und sehen neugierig nach (wir bilden das geometrisch in gleich langen Zeittakten ab), was dann nach dem Entfernen der äußeren Kraft mit dem System in Inneren so passiert.
PROGRAMM-EINSCHUB
Nach dem EVA-Prinzip (Eingabe, Verarbeitung, Ausgabe) bauen wir ein kleines Programm in VBA für EXCEL.
Die Eingabe erfolgt über das Auslesen von EXCEL-Zellen, in denen die jeweiligen Parameter stehen.
Die Ausgabe erfolgt in eine EXCEL-Tabelle, aus der EXCEL die unten abgebildeten Diagramme macht.
Das eigentliche Programm besteht aus zwei Teilen:
– Einrichten der Ausgangs-Situation (Auswahl unter 5 verschiedenen)
– Berechnen der Veränderung im Laufe von vielen Zeittakten (Anzahl und Dauer der Takte sind eingelesen worden)
Letzteres besteht innerhalb der Doppelschleife (außen Zeittakt, innen Teilchenabfrage über Nummer j) nur aus zwei Zeilen:
vxn(j) = (1 – rd / nt) * (vx(j) + dt * fk / m(j) * (-2 * x(j) + x(j – 1) + x(j + 1)))
xn(j) = x(j) + dt * vxn(j)
Man erkennt, dass hier erst alle neuen Daten vxn(j) und xn(j) ermittelt werden müssen, bevor die alten vx(j) und x(j) in einer weiteren Schleife überschrieben werden können. (Die Massen m(j) sind auch variabel angesetzt, die Federkonstante fk nicht. Zeittakt dt und Taktzahl nt sowie Dämpfung rd sind sowieso auch fest. Die Ausgabe erfolgt dann innerhalb der Gesamttaktzahl nur zehn mal, um ein übersichtliches Diagramm zu erhalten. Die beiden Randwerte werden den inneren Nachbarn gleichgesetzt. Die quadrierte Geschwindigkeits-Ausgabe erfolgt für eine Energie-Erhaltungs-Probe (kinetische und potentielle elastische Energie).
‚Bewegungs-Modellierung
‚Zeittakt
For k = 1 To nt
‚Massenbewegung
For j = 2 To n – 1
vxn(j) = (1 – rd / nt) * (vx(j) + dt * fk / m(j) * (-2 * x(j) + x(j – 1) + x(j + 1)))
xn(j) = x(j) + dt * vxn(j)
If Int(10 * k / nt) = 10 * k / nt Then
Cells(10 + j, 1 + 10 * k / nt) = xn(j)
Cells(10 + j, 12 + 10 * k / nt) = vxn(j) ^ 2
End If
Next
For j = 2 To n – 1
x(j) = xn(j)
vx(j) = vxn(j)
Next
x(1) = x(2): x(n) = x(n – 1)
vx(1) = vx(2): vx(n) = vx(n – 1)
Next
Dieses kleine Programm wird hier nicht gezeigt, um zu beweisen, wie „schlau“ ich bin, sondern im Gegenteil: Ich will ermutigen, mir zu folgen, weil man mit wenig Aufwand zu wunderbaren „Spielzeugen“ gelangen kann, mit deren Hilfe man mehr von der Natur verstehen kann. Die folgenden Bilder werden die Tragfähigkeit dieses winzigen Spielzeuges zeigen.
(Achtung: Alle folgenden Darstellungen sind der besseren Lesbarkeit deutlich – d.h. über 1000:1 – überhöht. Es existiert zwar im Modell kein physikalischer Zusammenhang zwischen beiden Achsen, aber die Vernachlässigung der Querkraft im gewählten Modell ist eigentlich nur unter der Annahme „kleiner“ Höhenunterschiede zwischen den Einzelmassen „erlaubt“, denn nur dann gilt genähert der lineare Ansatz: tan x = sin x = x.)

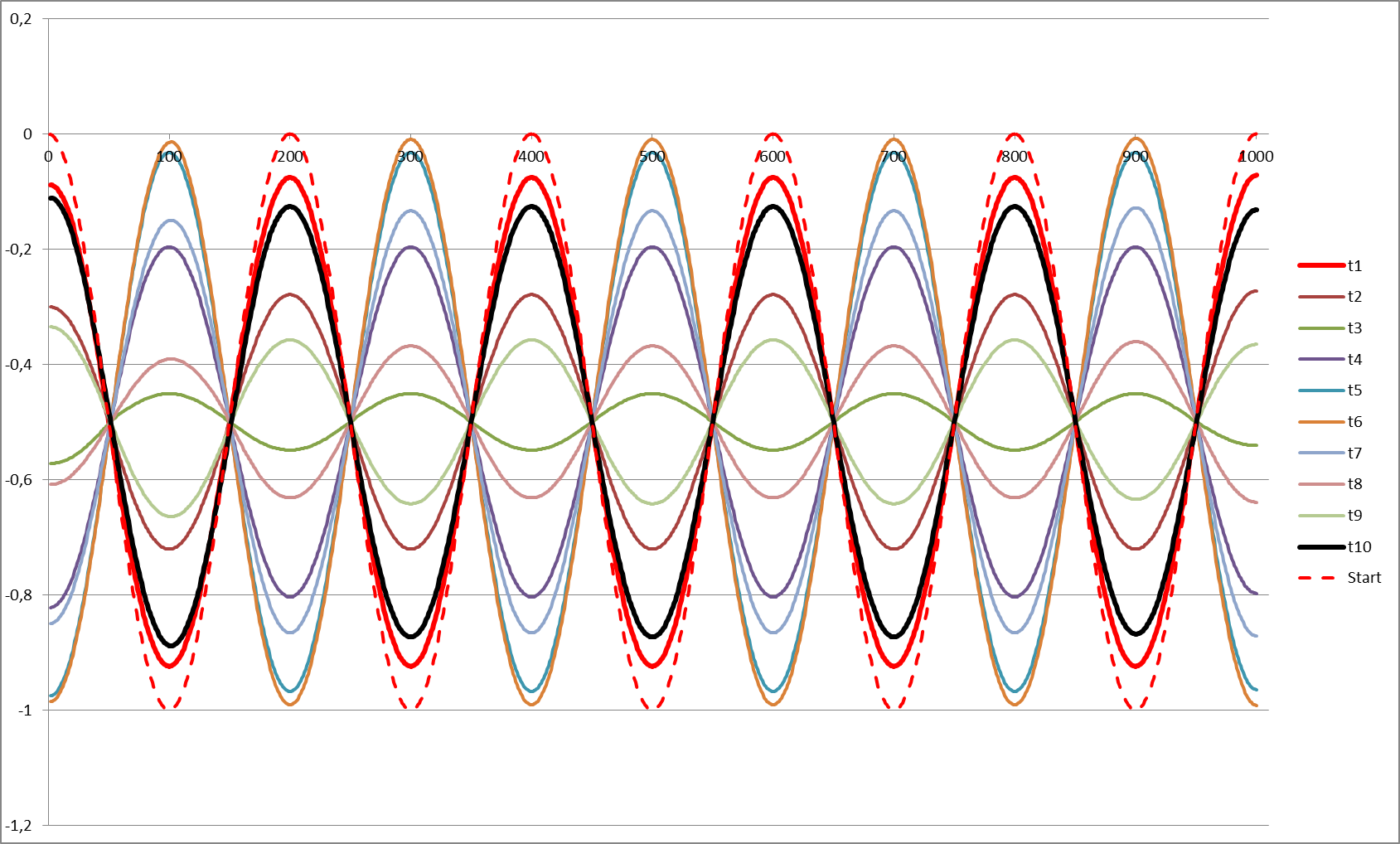
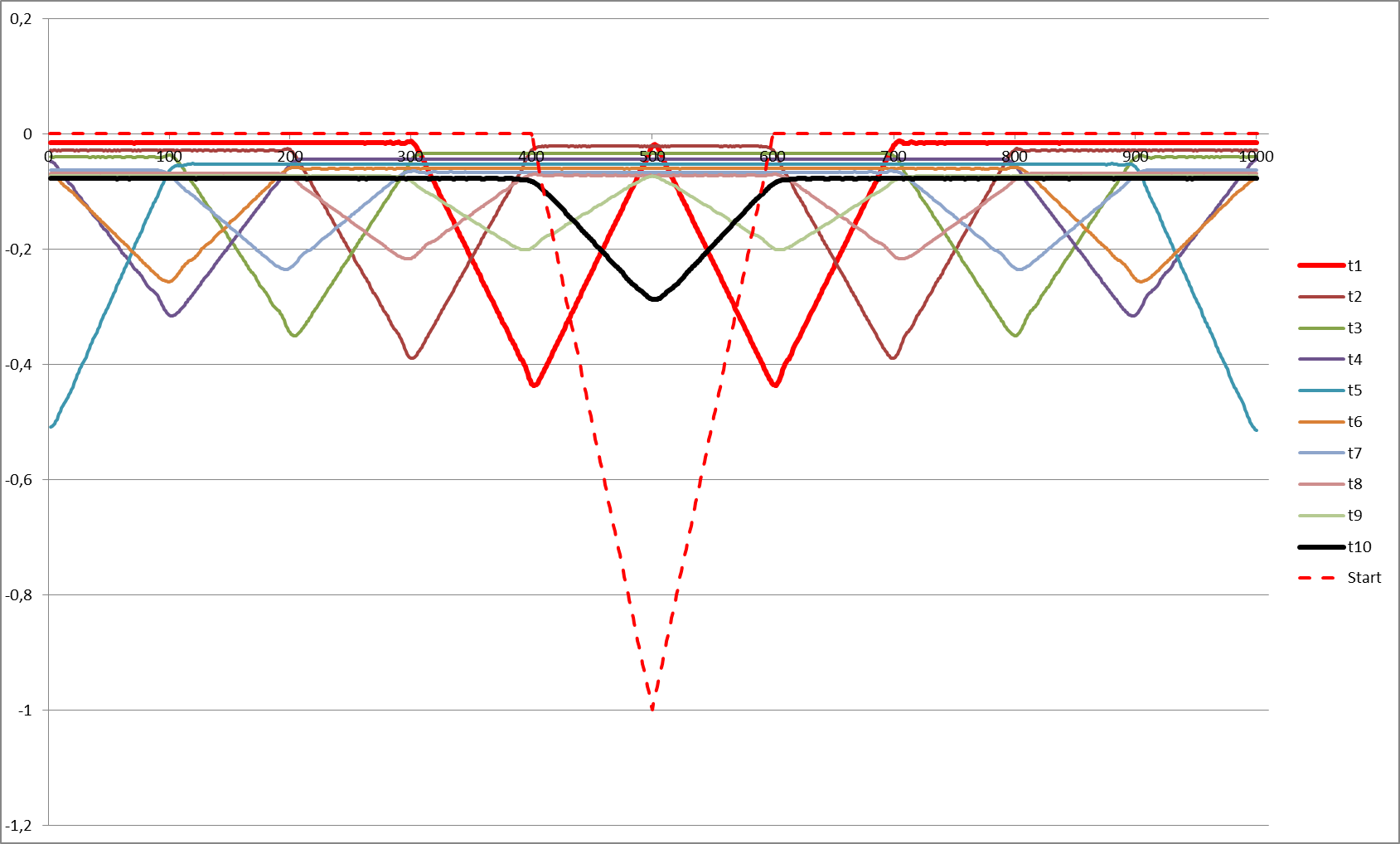
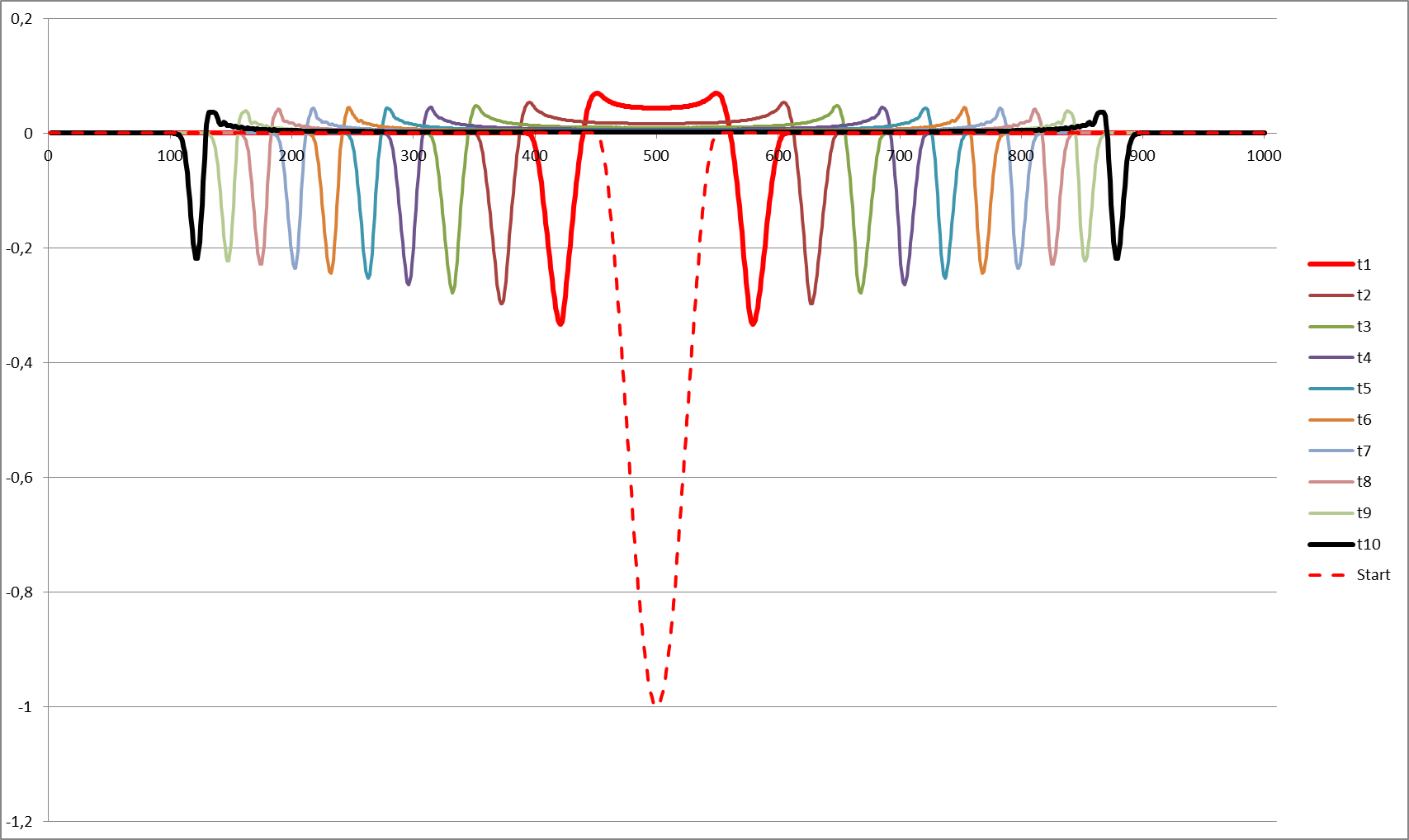
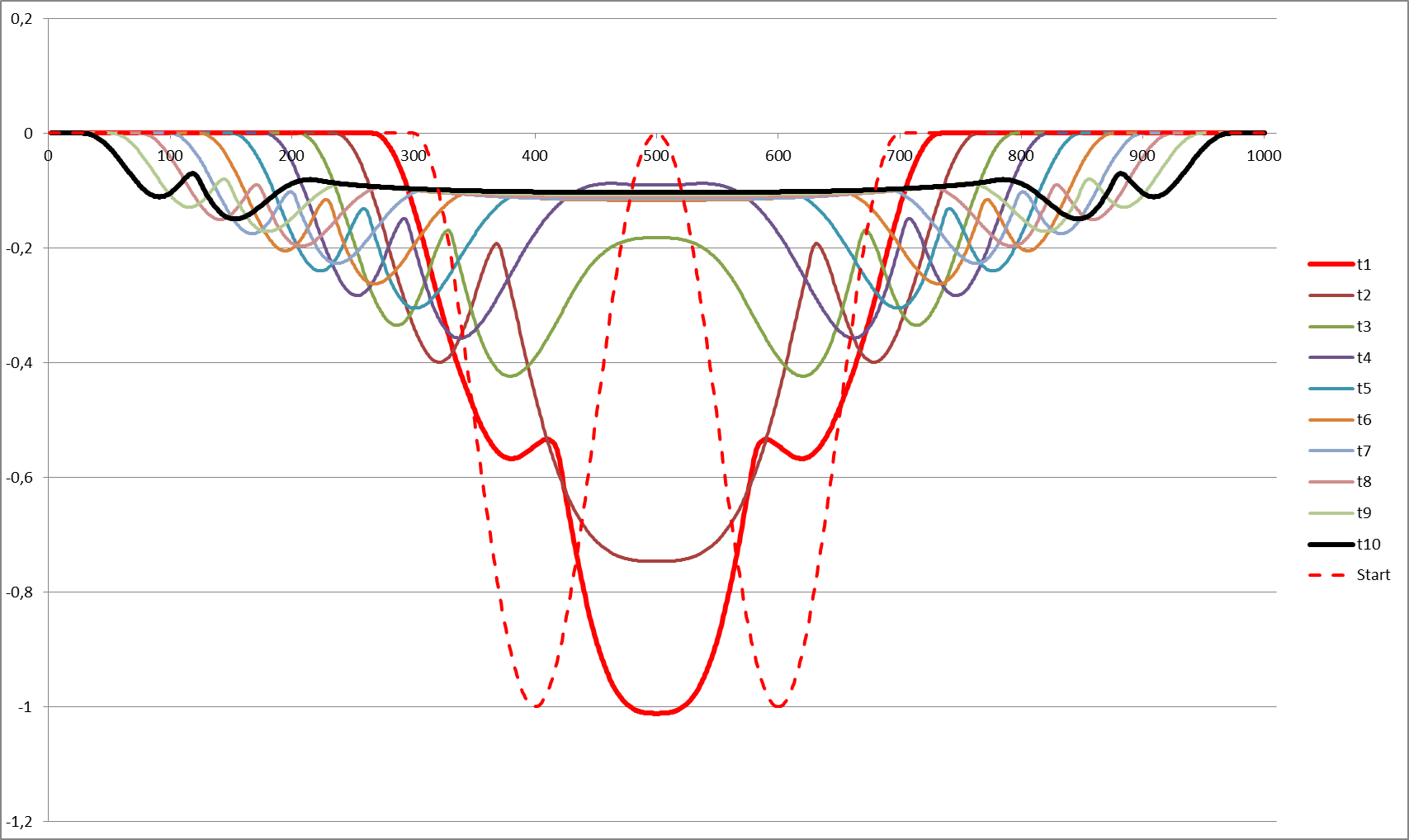
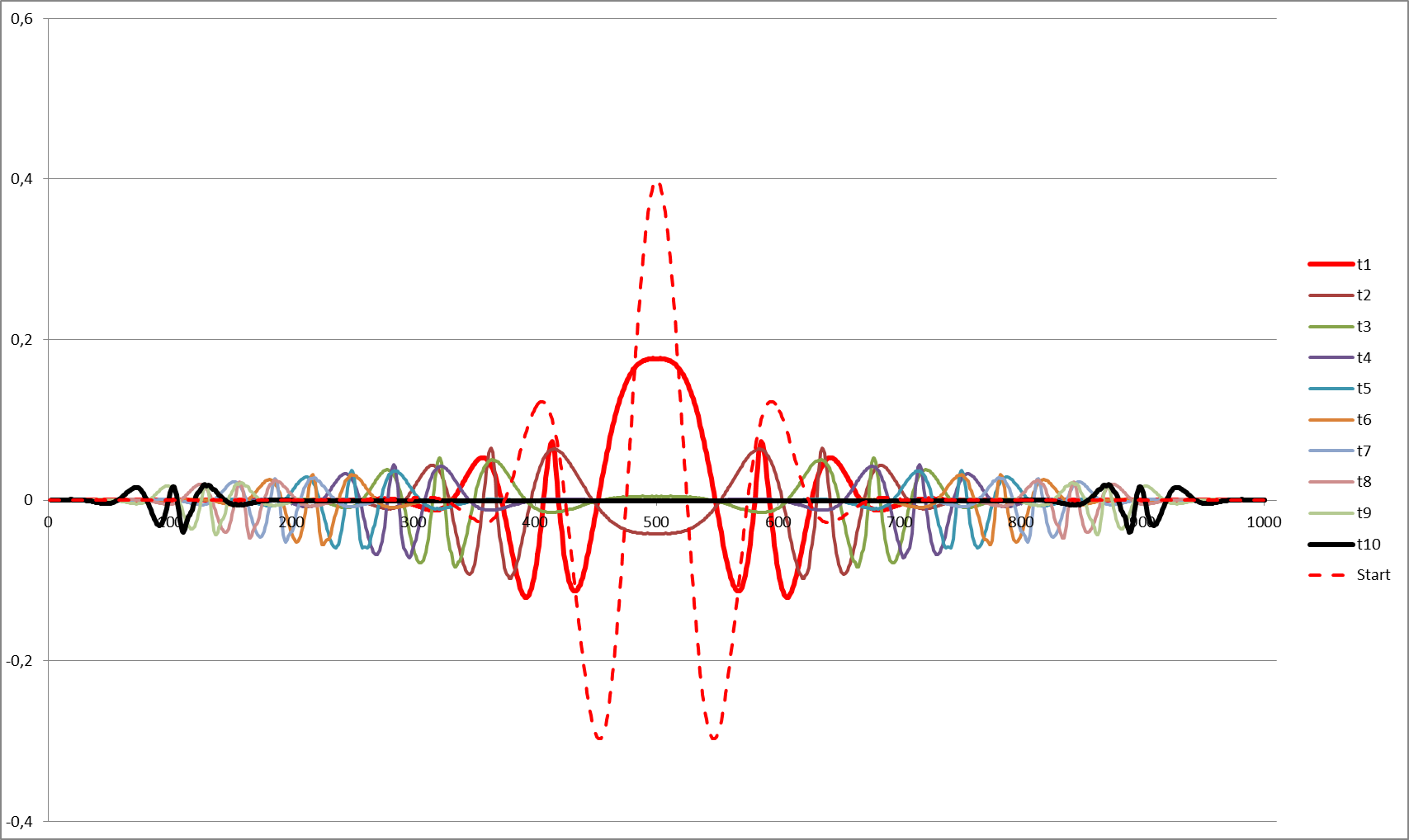
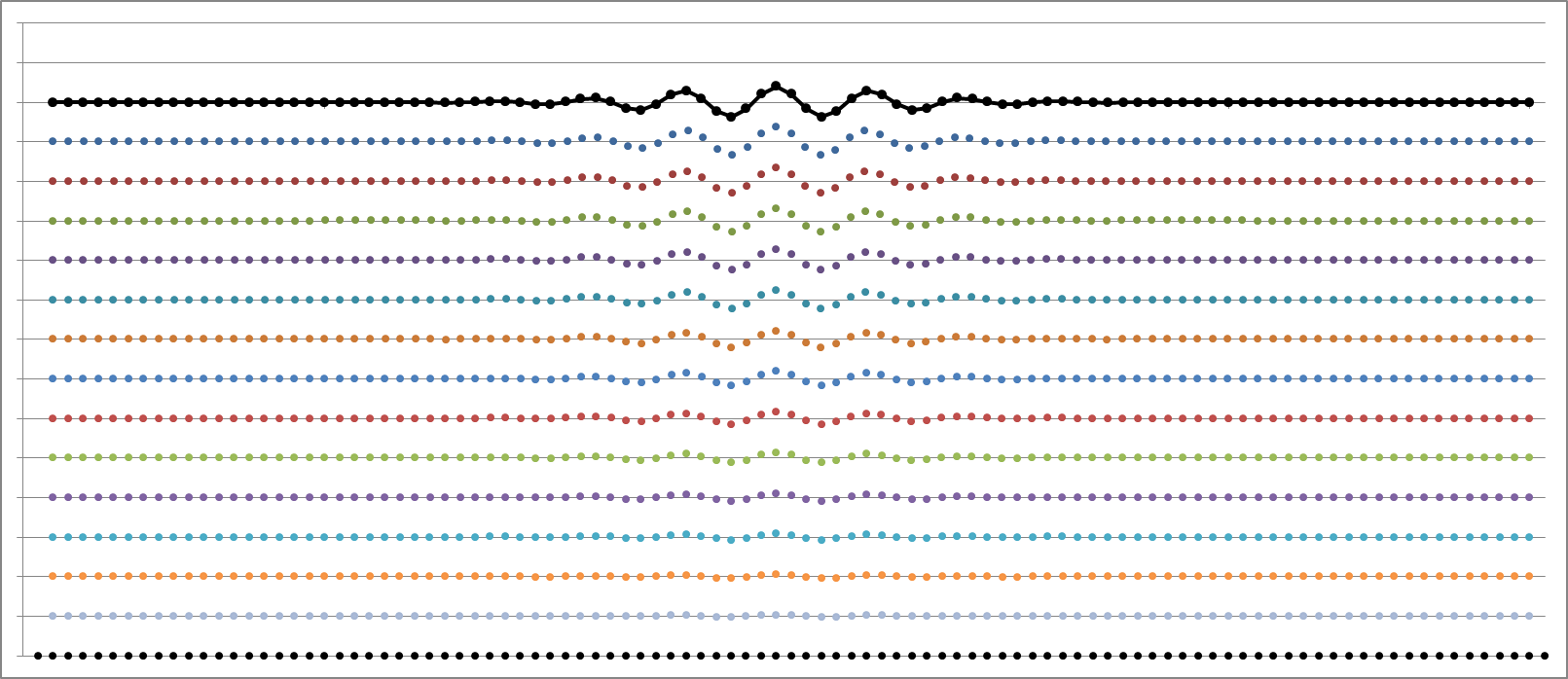
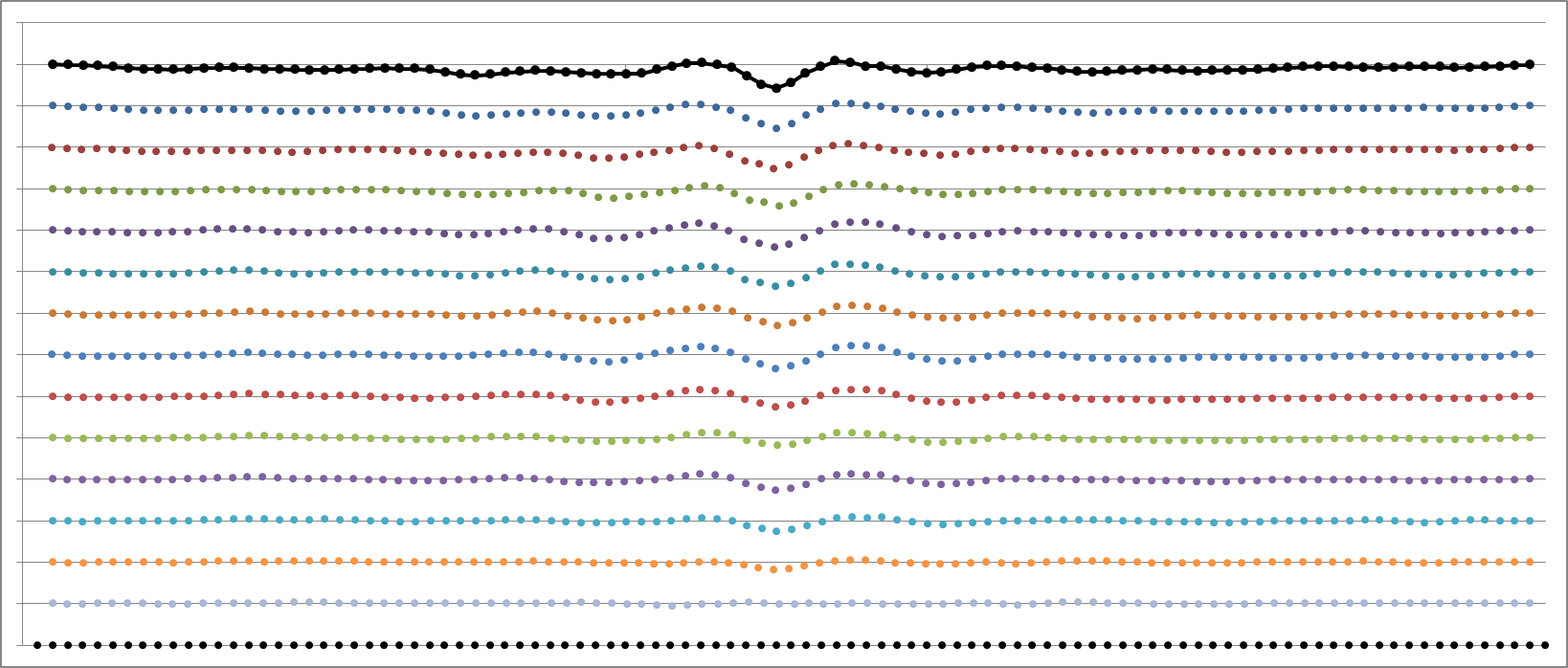
Dämpfungslose Welle nach Cosinus-Start: In der Mitte der 1001 Teilchen wurden 201 Teilchen cosinusförmig nach unten gezogen und dann losgelassen. Aus einem großen „Berg“ werden zwei halbgroße, mit konstanter Geschwindigkeit auseinanderlaufende „Berge“! (Start gestrichelt, erster Takt rot-dick, zehnter schwarz-dick: Jede Kurve ist das Wellenbild zu einem Zeitpunkt gleichen zeitlichen Abstands.) Im zweiten Takt „kippt“ das Wellenmaximum nach oben, weil alle Teilchen eine Masse und also eine Trägheit haben und weil alle Kräfte eine Gegenkraft haben.
Sofort setzt ein „Wundern“ ein: Wieso schwingt die „Start-Delle“ nicht nach oben über die Grundlinie durch?
Dieses Wundern zeigt, dass wir die prinzipielle Änderung gegenüber der individuellen elastischen Verbindung mit der Grundlinie in ihren Konsequenzen noch nicht richtig verstanden haben. Es ist jetzt so, dass die wirkende Gesamtkraft von beiden Nachbarn sich aufhebt, wenn die drei Teilchen auf einer Geraden liegen! Der Abstand zur Grundlinie kommt überhaupt nicht vor, sondern nur die Krümmung der Teilchenanordnung (das heißt, die Änderung des Anstiegs oder der Unterschied der Federlänge rechts und links). Zusätzlich wirkt allerdings auch noch die Trägheit. Diese könnte ebenfalls ein Überschwingen erzeugen, kann es im Zeitintegral der Kraft aber nicht, weil jetzt der Wendepunkt der Teilchen-Kurve kraftfrei ist, und ab da also eine Kraft weg von der Grundlinie wirkt. Vergessen wir einfach die unwichtige „Grundlinie“ und nehmen die durch die Wendepunkte gehende Symmetrieachse der Beulen-Anordnung, so schwingt die Halbwelle um diese, wie bei einer feineren Zeitauflösung zu sehen ist:

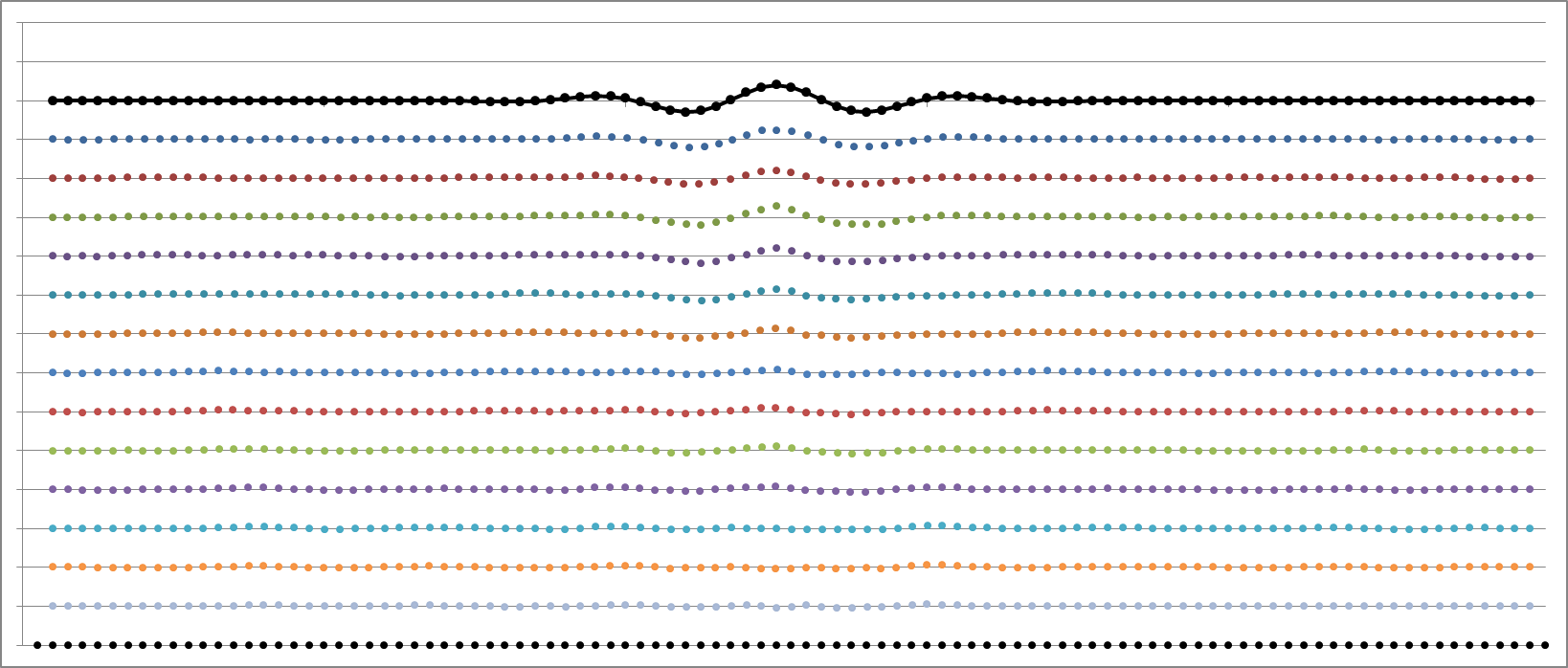
Fast symmetrisches Schwingen des Cosinus-Bauches um die Mittellinie der cos-Funktion, NICHT um die Grundlinie!
Auf einmal kommt eine Erinnerung an eine beeindruckende Vorstellung wieder:
In der Grundschule wurde eine Feuerwehr-Vorführung auf dem Schulhof gemacht. Ein kleines Feuer wurde angefacht und dann gelöscht.
STAUNEN Nr.1: Ein aufgewickelter Schlauch kann sich von allein bis zu seinem Ende „entwickeln“, wenn man die Rolle richtig wie ein Kegelspieler anschiebt!
STAUNEN Nr.2: Man kann mit einem Wellenschlag am Ende des Feuerwehrschlauchs einen Buckel durch die gesamte Länge sausen lassen!!
Ja, da war nicht einmal eine Elastizität im Spiel, sondern lediglich ein Impuls, der sich fortpflanzt, indem er sich von Schlauch-Stück zu Schlauch-Stück überträgt. Man kann das mit einem nicht zu dünnen Seil, das man auf den Fußboden legt, oder mit einem Gartenschlauch auf der Wiese jederzeit nachmachen! Und Kinder freuen sich in Parks daran, dass sie das mit Einfassung-Ketten machen, wo bei wackligen Pfosten der Impuls sogar über die Pfosten hinaus übertragen wird…
Hätten wir eine unendlich ausgebreitete cos-Funktion als Start genommen, hätten wir an diesem Ergebnis nie gezweifelt und eine stehende Welle erzeugt (die man als Projektion einer um ihre Achse bei -0,5 rotierende cos-Funktion verstehen kann):
Eine periodische Startanordnung führt zu einer „stehenden Welle“
Hier die Erinnerung an die schwingende Saite, die ja eingespannt ist und eine Art stehender Welle ausbildet (siehe Abschnitt über Klangfarbe):

Zeitverlauf der Schwingung bei einer nicht mittig angezupften Saite an verschiednen Punkten der Saite

Stroboskopische Bilder zu verschiednen Zeitpunkten an einer nicht mittig angezupften Saite: Der „Endzustand“ muss sich erst „einschwingen“!
Zurück zu unserem Modell in diesem Abschnitt:
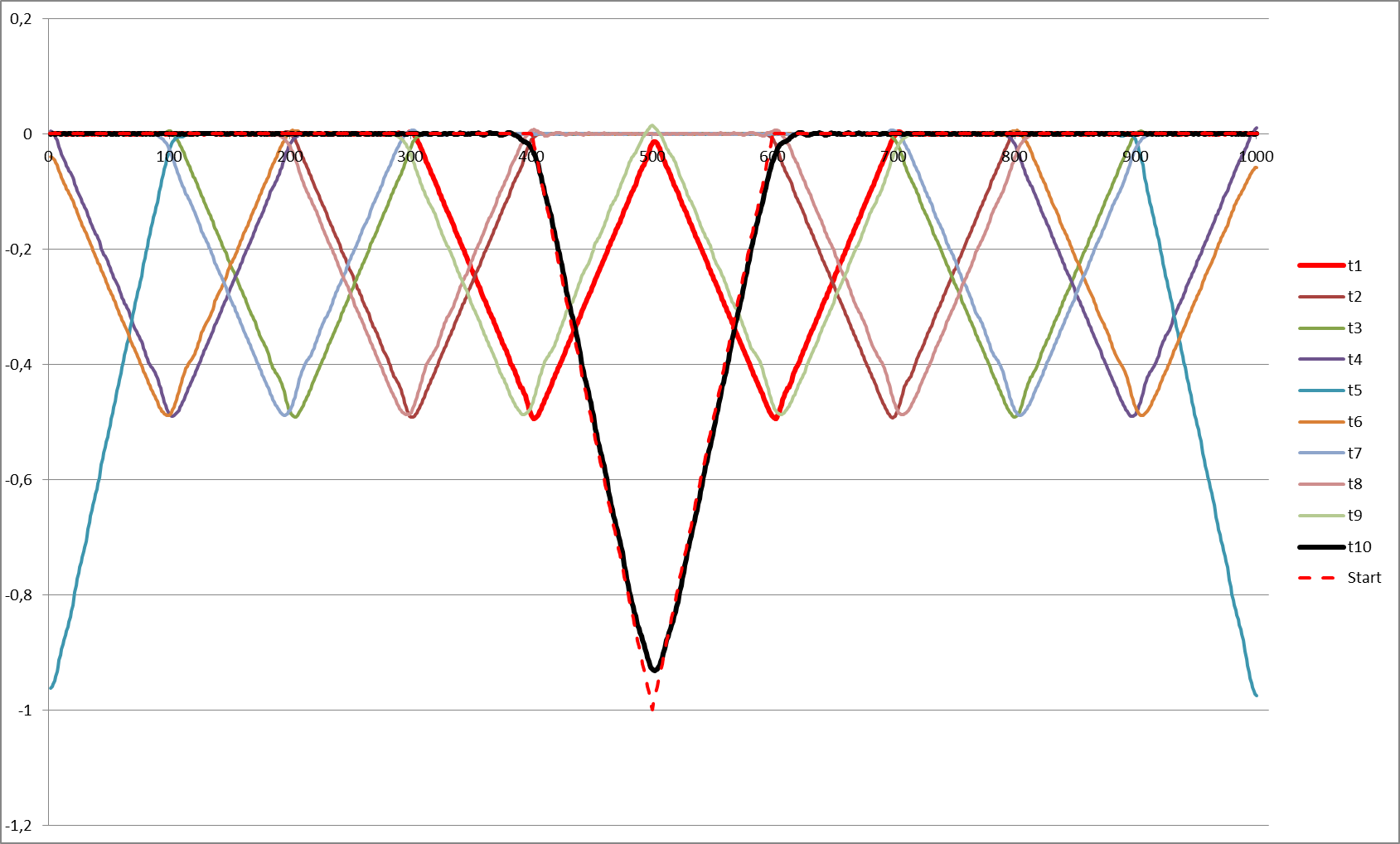
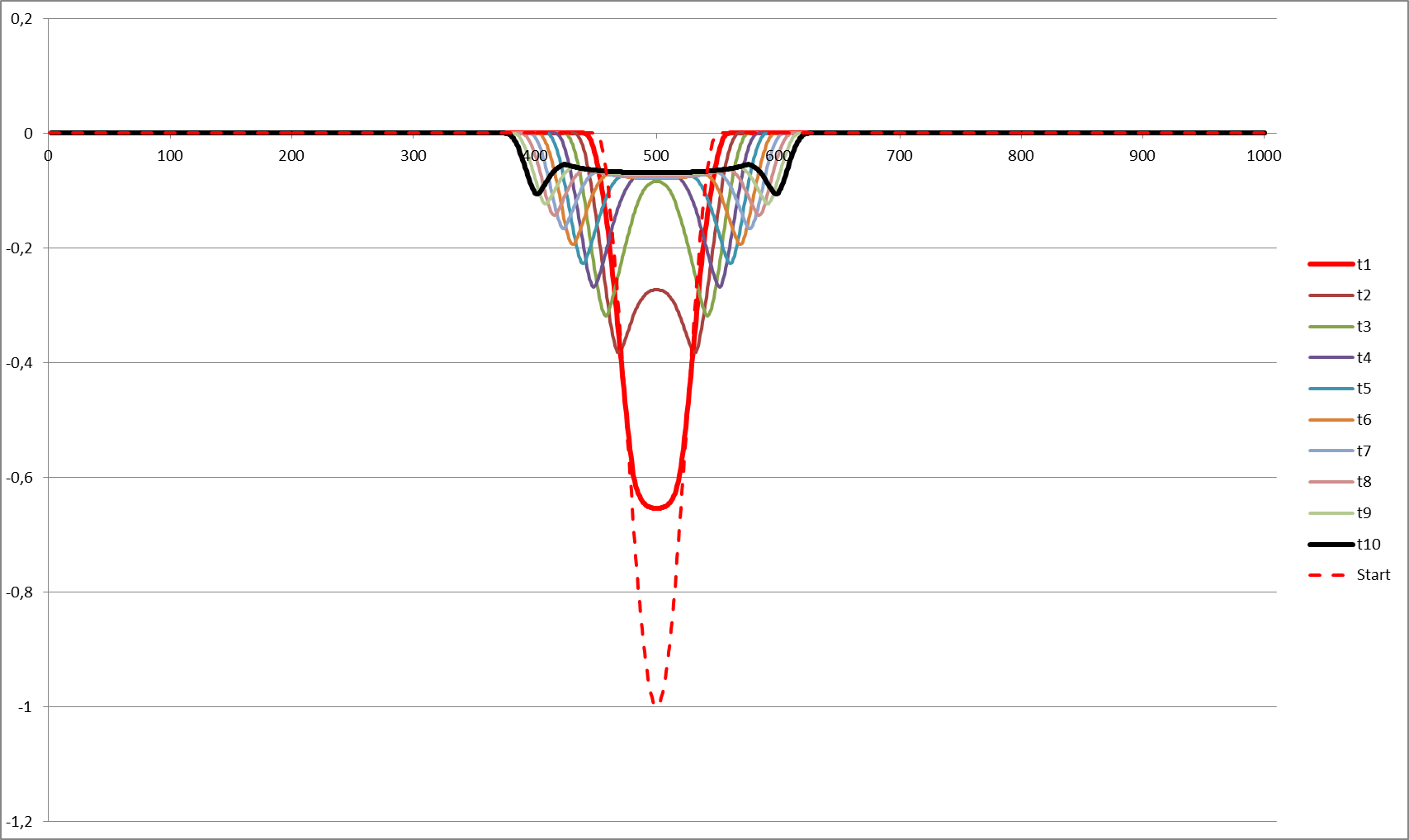
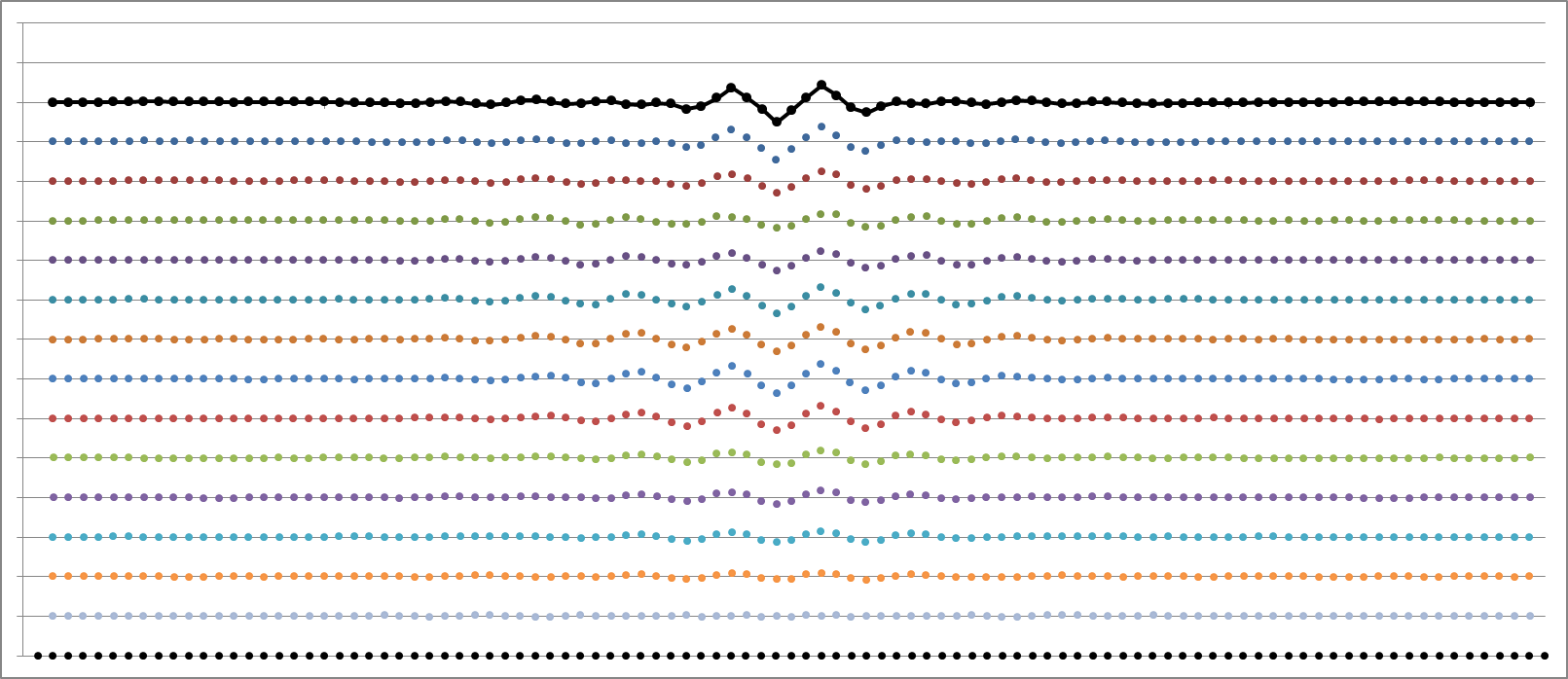
Mit einer eingeführten Dämpfung wird die „wirkliche“ Symmetrie noch viel deutlicher:

Unser singulärer Ansatz einer einzigen Periode aber erzeugt nun das Wandern der beiden verbleibenden „Halbwellen“ nach außen, wie wir oben schon gesehen haben!
PHYSIK-EINSCHUB
Ist das eigentlich verständlich, dass ein einzelner unbeweglicher Cosinus-Bauch zwei bewegliche Cosinus-Bäuche „gebiert“, wie bei einer „Paar-Erzeugung“?
Wir überlegen uns jetzt die Impuls-Erhaltung und die Energie-Erhaltung (und lassen dann das Programm nachrechnen).
Impuls-Erhaltung: Im Start waren alle Teilchen in Ruhe, Gesamt-Impuls ist also Null. Die beiden Cosinus-Bäuche bewegen sich zwar nach außen, aber alle Teilchen für sich bewegen sich nur nach oben oder unten. Die äußeren Halbwellen bewegen sich beide nach unten, die inneren beiden nach oben. Das gleicht sich exakt zum Gesamtimpuls Null aus!
Energie-Erhaltung: Im Start existiert nur die elastische Energie aller Federspannungen. Hier haben wir nur die senkrechten Komponenten berücksichtigt. Ihre Kraft-Summe ist also zweimal die Amplitude des Start-Cosinus, mulitpliziert mit der Federkonstanten. Die elastische Energie einer Feder aber berechnet sich über je W(el) = k/2*dx² (Kraft über den Federweg integriert!).
Wenn die beiden Cosinus-Bäuche dann auseinanderlaufen, setzt sich die Gesamt-Energie aus der elastischen und der kinetischen jeder Teilmasse zusammen. Im obigen ungedämpften Fall ist die Breite der beiden Cosinus-Bäuche die gleiche wie die des Start-Bauches, ihre Amplitude aber je halb so groß. Sie haben zwar zusammen die gleiche Fläche, aber durch den quadratischen Zusammenhang nur die halbe Energie. Die andere Hälfte ist die richtungsunabhängige kinetische Energie aller Teilchen. (Das wird durch eine numerische Prüfung durch Summation im Programm eindrucksvoll bestätigt, sobald alle Teilchen nacheinander in die Bewegung einbezogen worden sind. Das gilt natürlich auch – siehe unten – bei einer Dämpfung, wie numerisch bestätigt worden ist.)
Warum ist das so? Bei der harmonischen Schwingung wechselt die Energie ständig von der potentiellen in die kinetische. Im Zeitmittel sind beide gleich, also je die Hälfte der Gesamtenergie. Und hier haben wir also den „thermodynamischen“ Fall, dass wir das „Zeitmittel“ gleich dem „Scharmittel“ setzen können, weil wir viele gekoppelte Schwinger haben, und zwar für jeden Energie-Anteil für sich. Niemand hat diese thermodynamischen Prinzipien ins Modell gesteckt, sie sind „von allein“ realisiert, wie die nachträgliche Rechnung im Modell-Ergebnis beweist. So macht Physik Spaß!
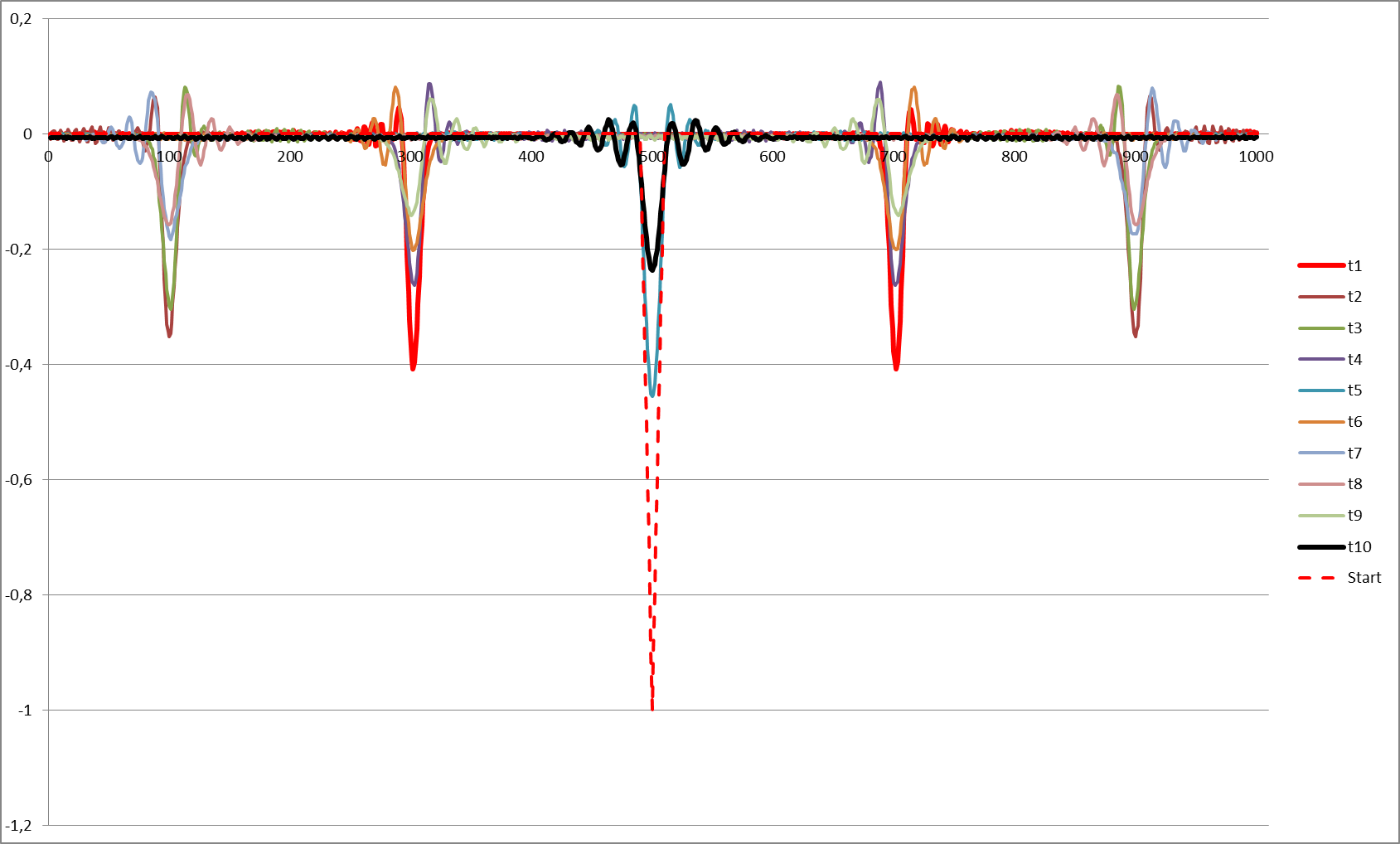
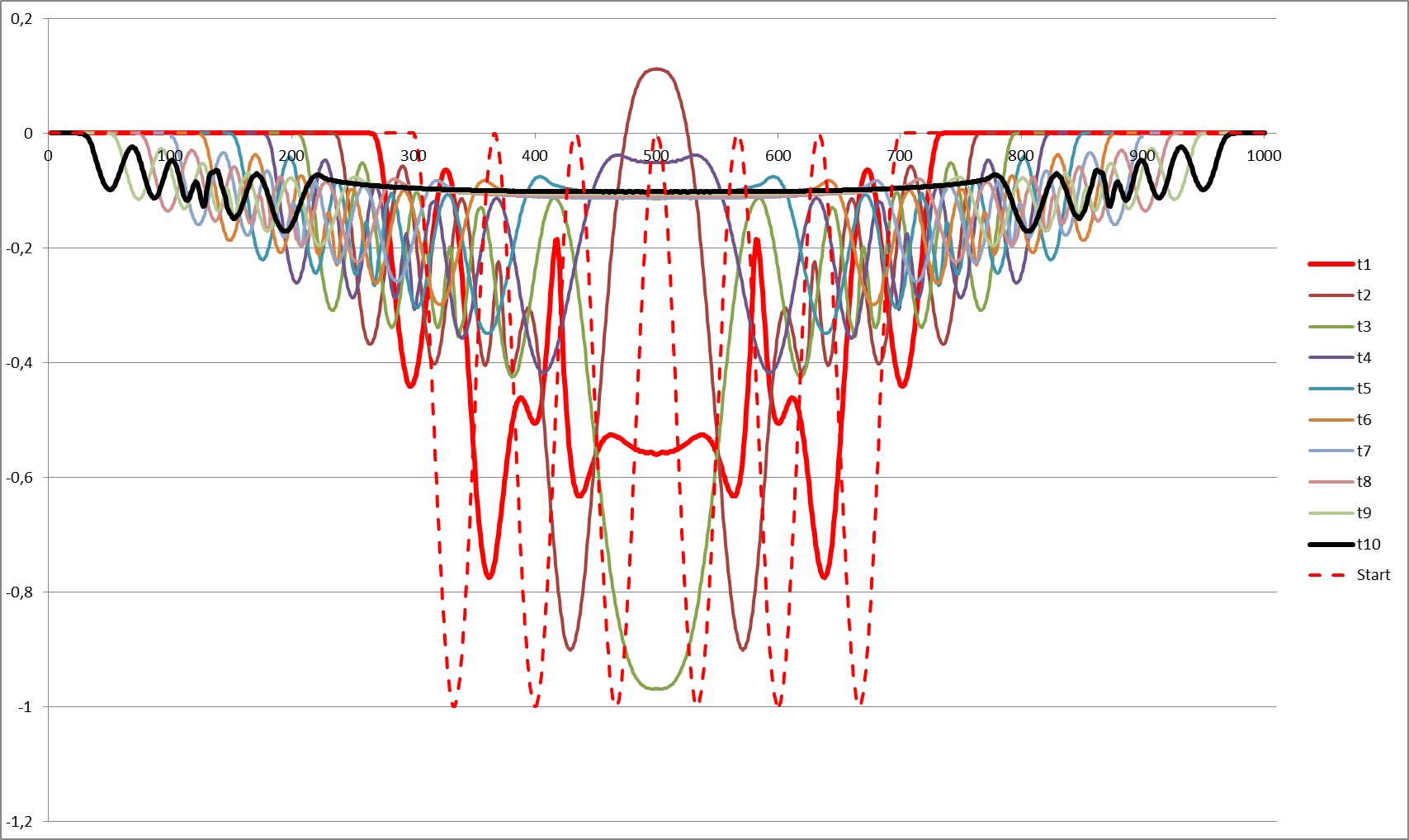
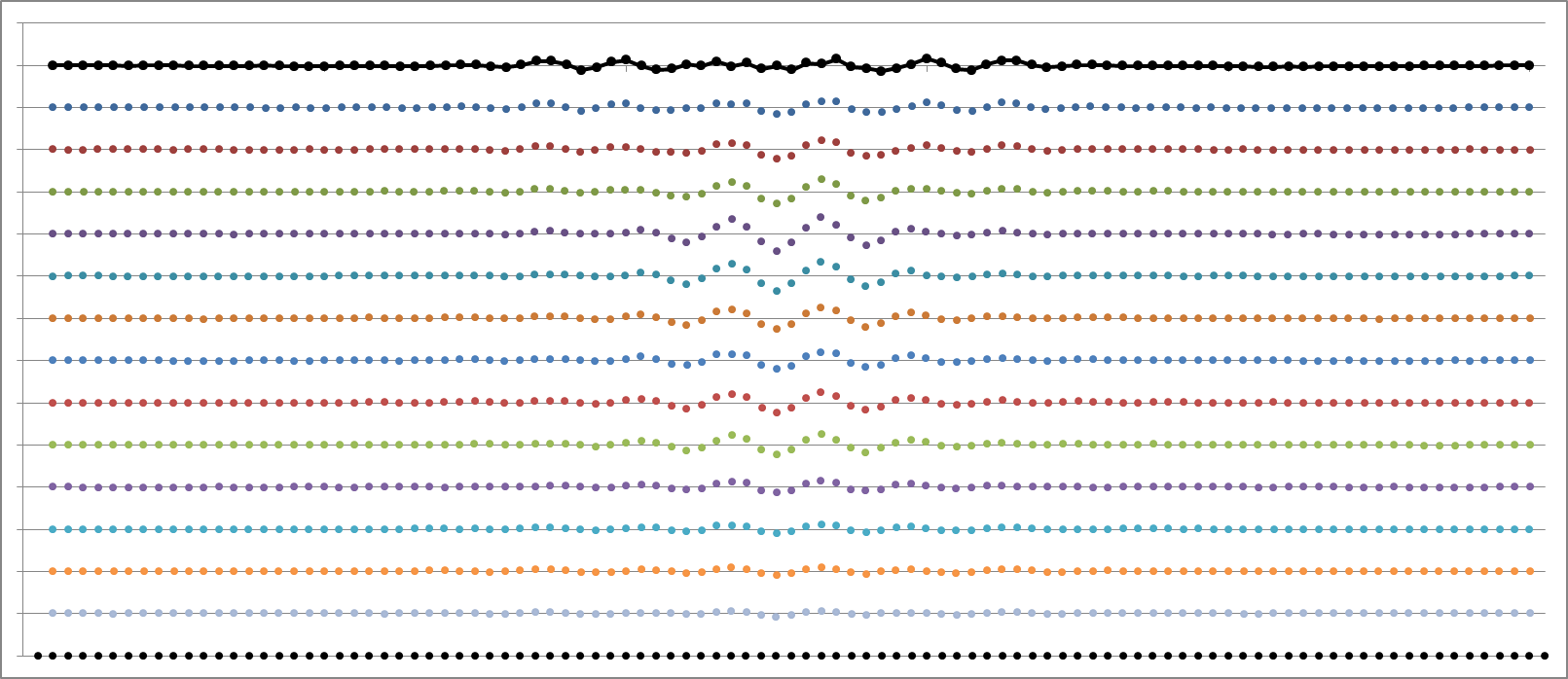
Jetzt wird der Vorgang mit dem obigen singulären Start etwas in der Geschwindigkeit der Einzelteilchen gedämpft, und zwar geschwindigkeitsproportional:

Man erkennt das schnelle Abnehmen der Amplitude beim Auseinanderlaufen der Welle. Die Bewegungsnergie wurde über Reibung in „Wärme“ umgesetzt, die Teilchen kehren nicht zur Grundlinie zurück. (Das darf nicht mit der Abnahme der Amplitude bei einer Kreiswelle verwechselt werden, denn dort verteilt sich die Energie auf eine immer größer werdende Fläche!)
Ändert man die Startform in ein Dreieck, sieht das so aus:
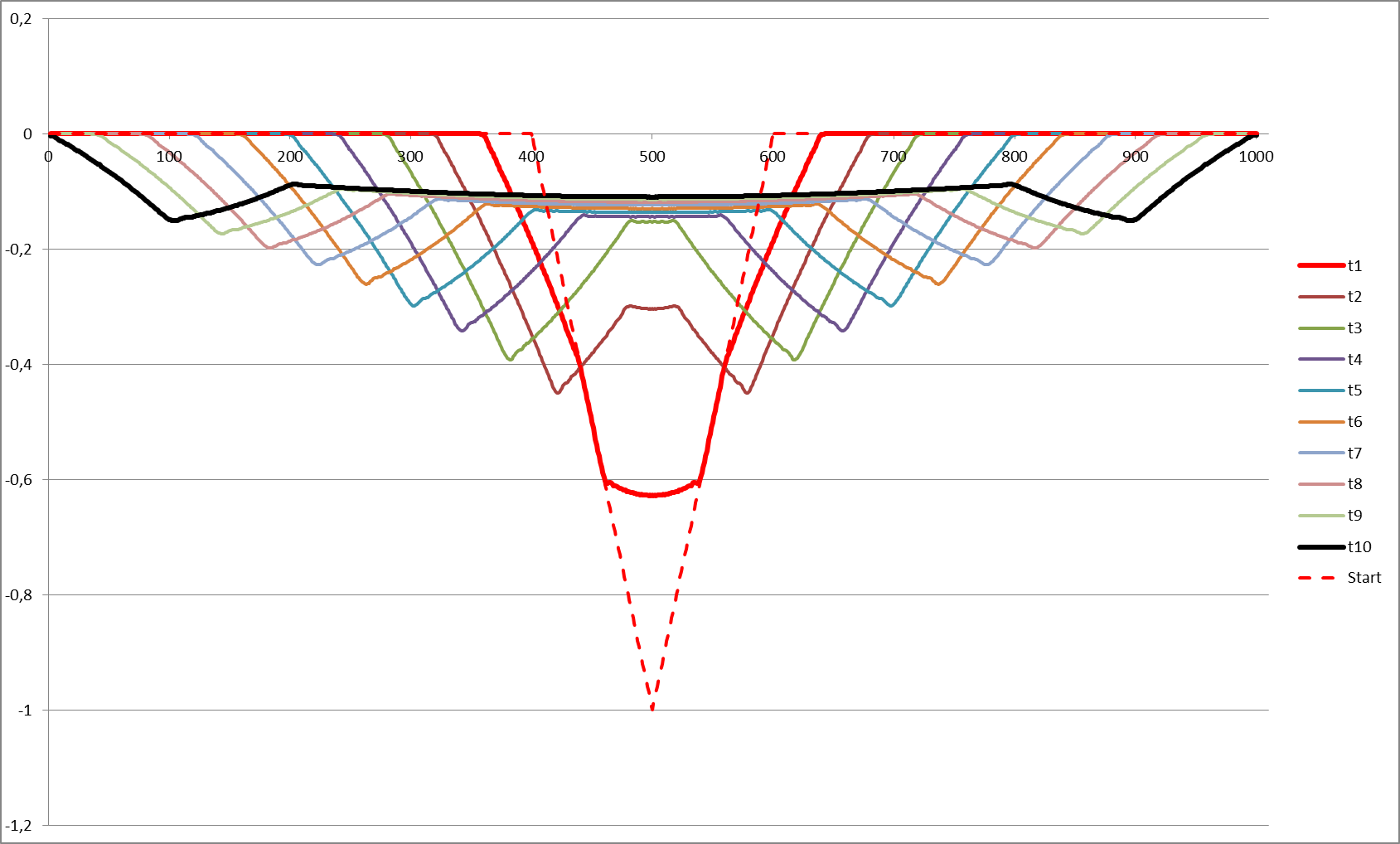
Bei einem Dreieck-Start ergeben sich später wieder Dreiecke
Stratet man mit einer Parabel, wird es so:
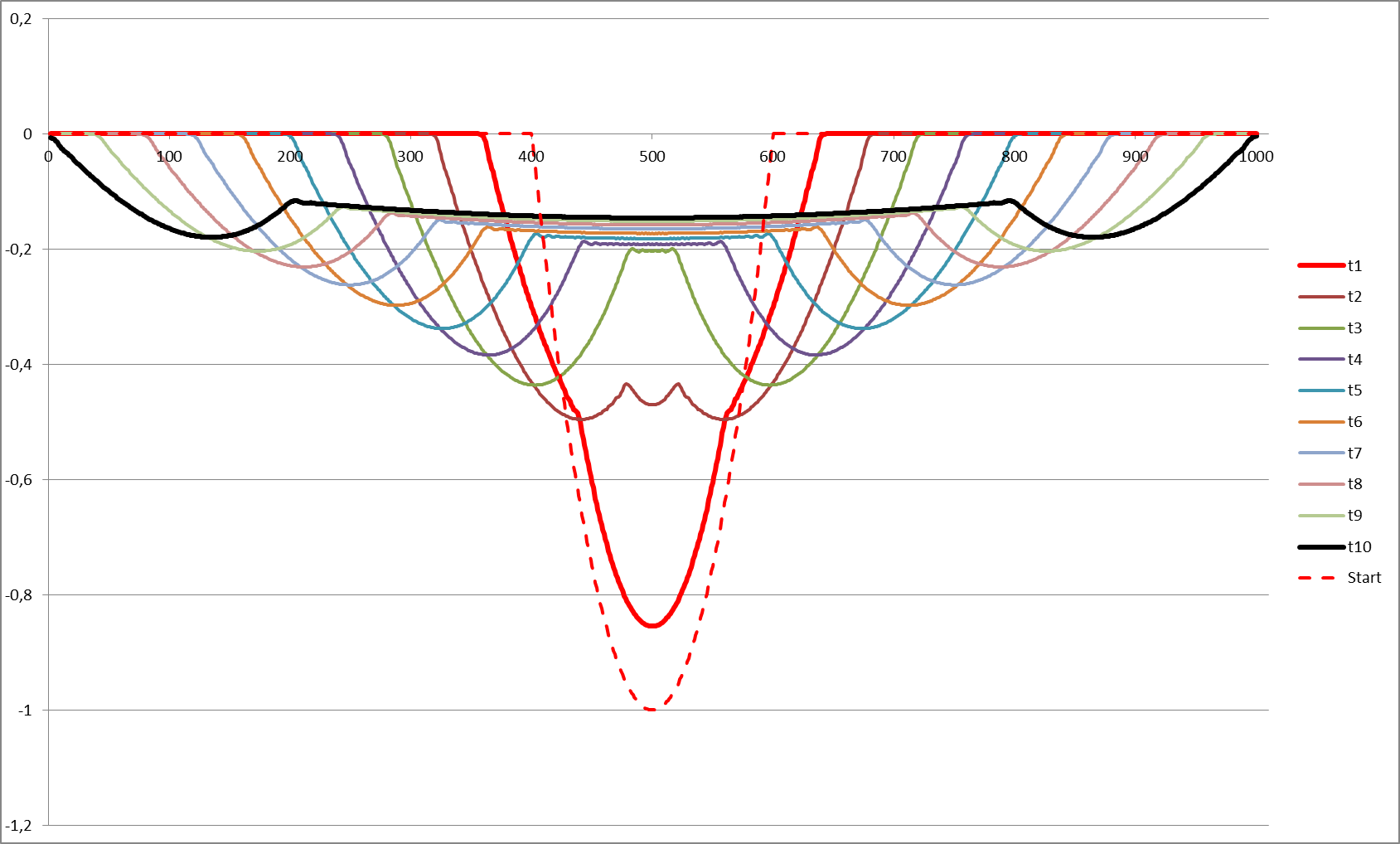
Jetzt kommt man ins Grübeln!
So richtig will man das Ergebnis nicht akzeptieren, und das liegt am sequentiellen Abarbeiten: In jedem Programm-Takt wird ein zusätzliches Teilchen durch die elastischen (Feder-) Kräfte erreicht. Zur Probe sollte man einmal „Programm-Artefakte“ provozieren:
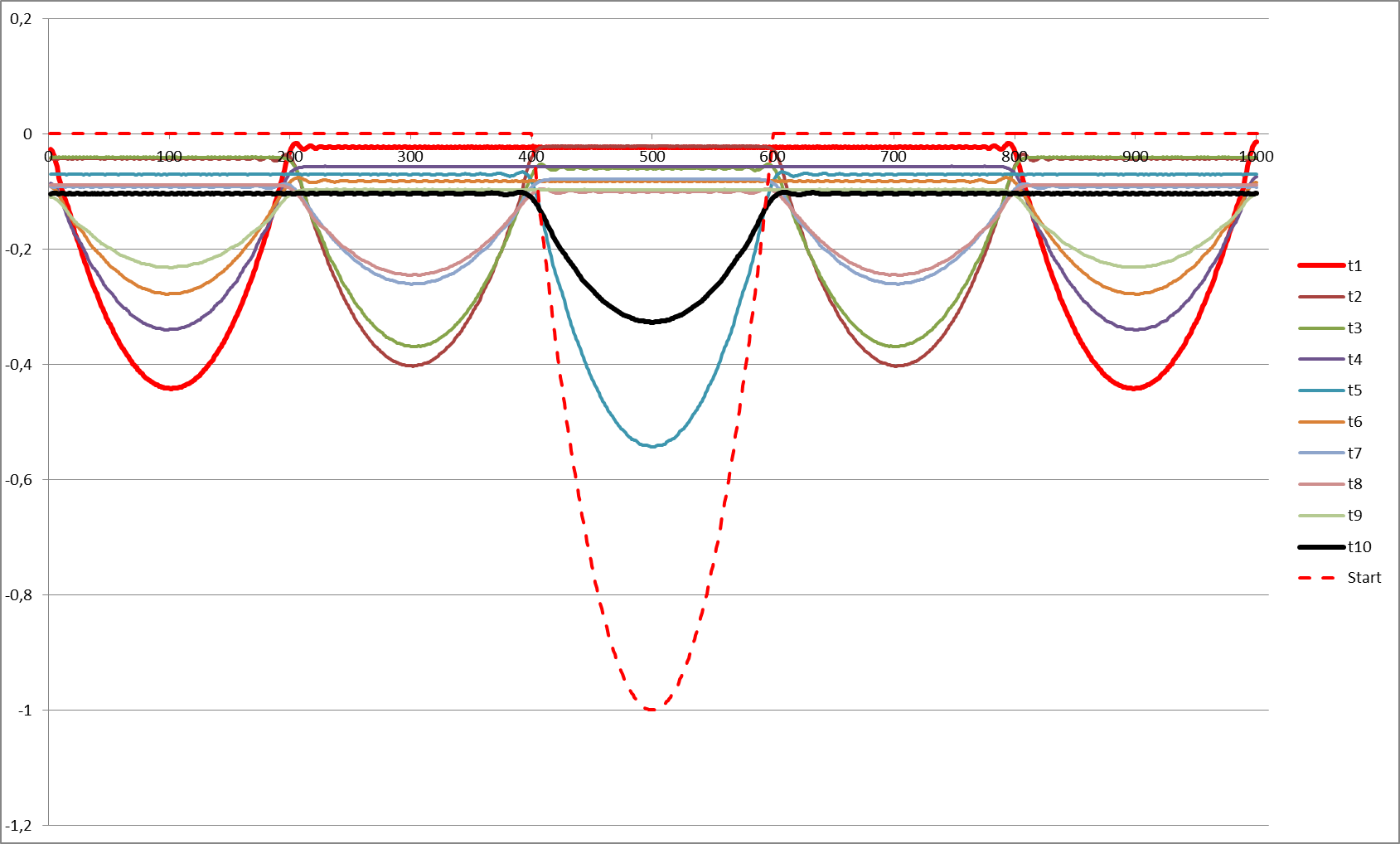
Man erkennt zwei interessante Dinge: bei 10-facher Takt-Länge kleine Zusatzschwingungen am Fuße der Parabel und eine Reflexion der Welle an den beiden Rändern der Anordnung.
Bei 22-facher Taktlänge und Dreieck-Start sieht man allerdings auch eine Abrundung der Ecken, was wiederum unserer Erwartung entspricht:
Der Dreieck-Fuß rundet sich ab.
Da auch ohne Dämpfung eine Abrundung sogar der Spitze entsteht, scheint das Modell am Ende doch tragfähig zu sein:
Eine geringe „Oberflächenspannung“ scheint die Spitzen zu „glätten“.
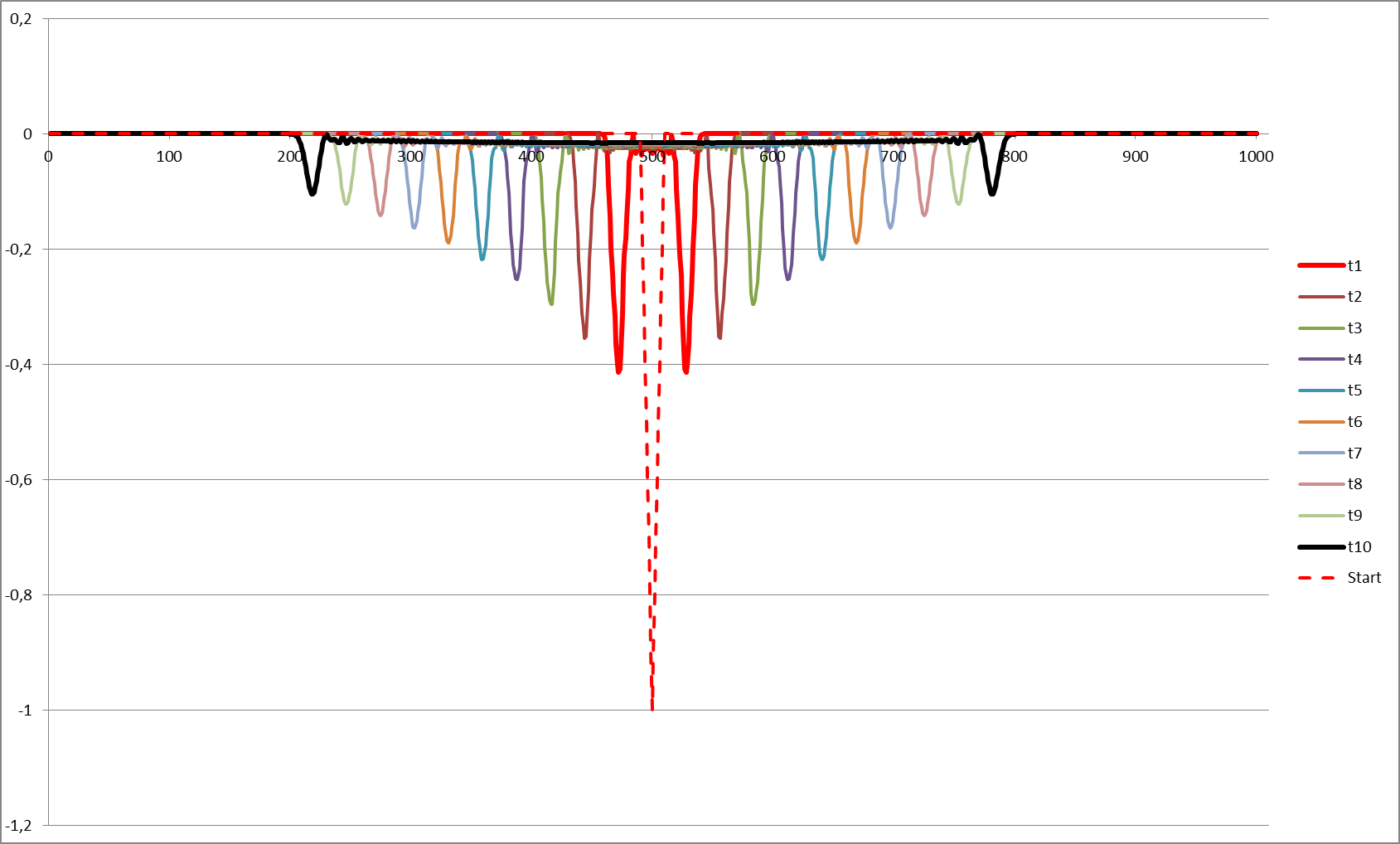
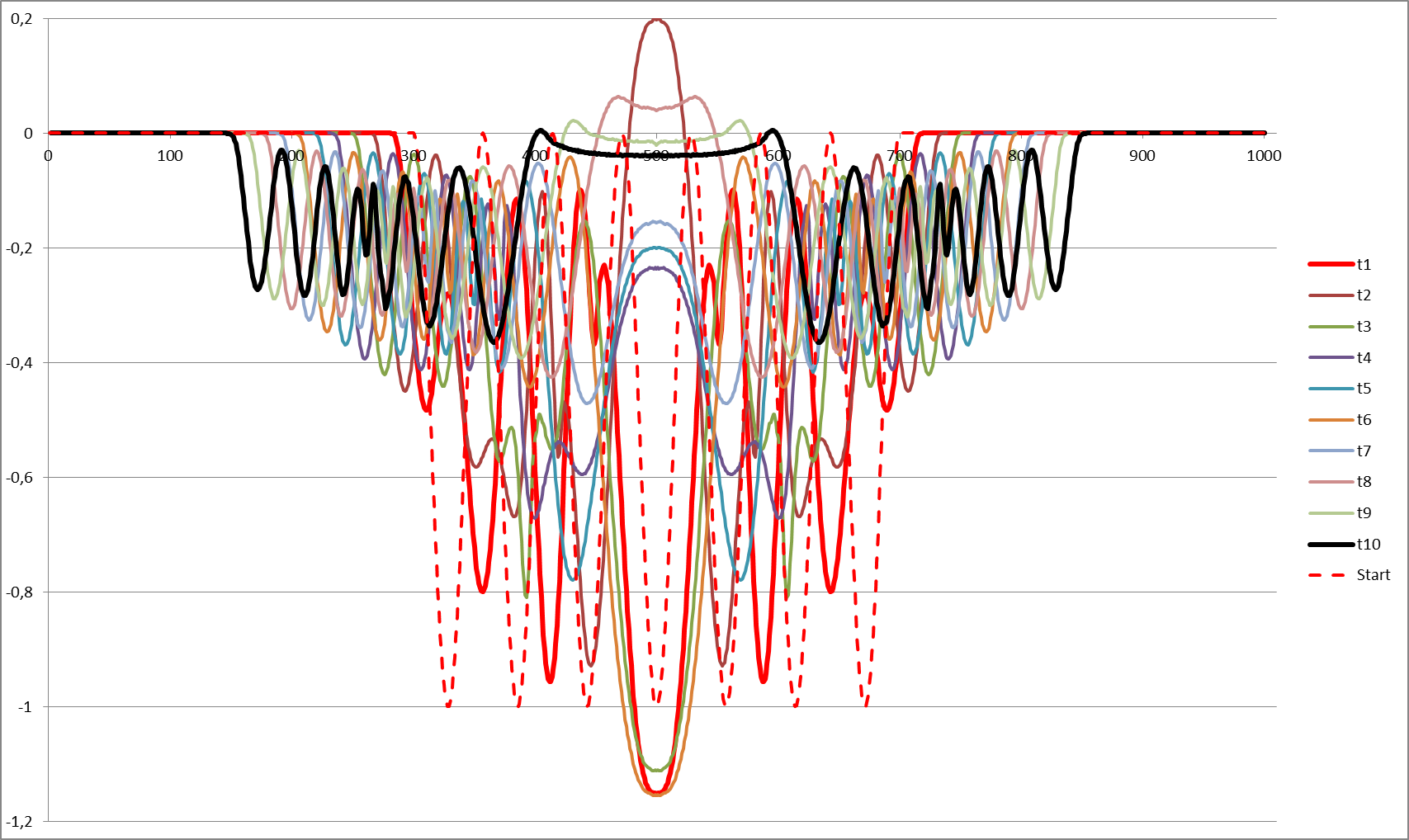
Reizt man den Rahmen des Modells noch weiter aus, indem man die Anzahl der ausgelenkten Teilchen reduziert, wodurch bei gleicher Zugweite nach unten die Kräfte erhöht werden, so kommt man bei 21 statt 201 gezogenen Teilchen tatsächlich kurz vor die Aufschwingen-Katastrophe der Numerik:

Die vielen Zacken zeigen das Gegenteil von „Glättung“: Grenze des numerischen Modells erreicht.
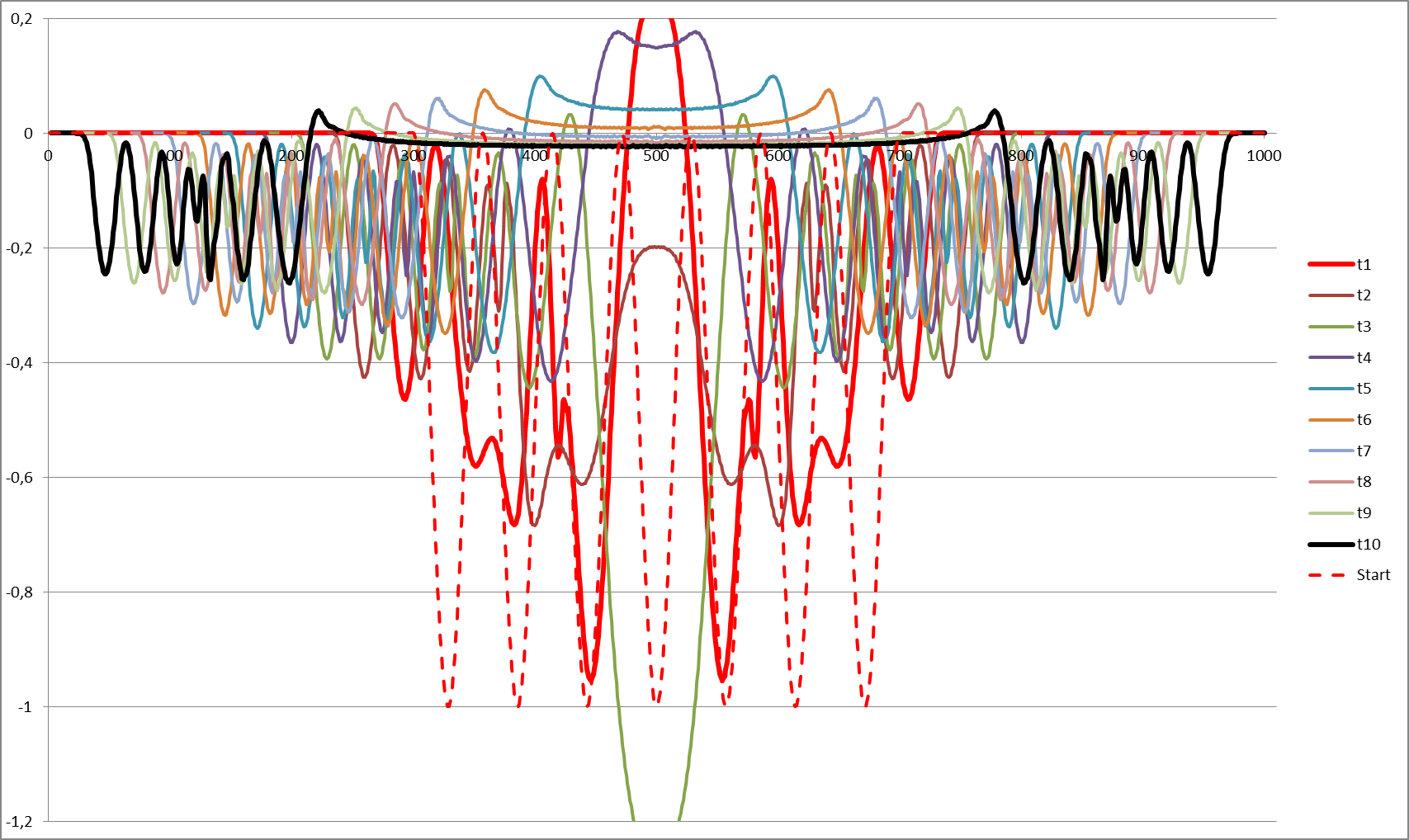
Auch hier kann die Dämpfung ein wenig glätten, wie man (Zeittakt etwas geändert) leicht sieht:
Schlussfolgerung aus dem ersten (einfachsten!!) Wellen-Modell: Mit einem Cosinus-Start liegt man am dichtesten an der „Natur“ der Sache dran. Die Stabilität des Modells erhöht sich mit etwas Dämpfung und mit der Vergrößerung der Teilchenzahl und mit der Verkleinerung des Zeittakts, aber die angenommene Kurzreichweite (nur mit beiden nächsten Nachbarn pro Takt korreliert) könnte wirklichkeitsfremd sein.
Man könnte das an der Ermittlung der Ausbreitungsgeschwindigkeit prüfen, die ja physikalisch nicht von der Taktzeit abhängen sollte!
Hier der Vergleich mit Faktoren 1/10 in Taktzahl und 10 in Taktzeit (10*1/10=1):


Die Unterschiede sind nur marginal in den „Satelliten“ der Dreiecks-Füße zu sehen, die Ausbreitungsgeschwindigkeit ist exakt die gleiche. Da das im ungünstigtsen Start-Fall des Dreiecks ermittelt worden ist, kann man also allgemeine Bedenken fallen lassen. Trotzdem muss man noch einen letzten Zweifel ausräumen: Ist nicht das Produkt von Taktzahl (10000 und 1000) und Taktzeit (0,04 und 0,4) exakt gleich der Zahl der neu erfassten Teilchen, nämlich rechts und links je 400? Was macht eigentlich die Federkonstante??
Hier ist diese jetzt halbiert, und siehe:
Eine Halbierung der Federkonstante verringert die Ausbreitungsgeschwindigkeit: Der Ort des schwarzen Minimums ist statt 400 Positionen 282 gewandert.
Diese „Wanderung“ entspricht einer Verlangsamung der Welle um den Faktor Wurzel(2), was uns aus der Schwingungsgleichung sehr bekannt vorkommt! Damit ist bewiesen, dass die seitliche Ausbreitungsgeschwindigkeit von der senkrechten Kraft und nicht vom Programm-Takt abhängig ist. Auch das spricht für das Modell.
Hier zum Abschluss noch ein „unwirklicher“ extremer Fall, wenn man mit einem Rechteck startet, dessen „Kante“ natürlich noch bösartiger wirkt (übrige Parameter unverändert):

Und doch bleiben noch kritische Nach-Betrachtungen:
a) Ein solcher Modellierungs-Ansatz war immer sinnvoll, wenn man zu einem statischen Endzustand, einem Gleichgewicht also, kommen wollte, um genau dieses Gleichgesicht nicht analytisch berechnen zu müssen. Das ist also blendend geeignet, elastische Gebilde im statischen Endzustand zu „finden“, wie z.B. die woanders behandelten Federflächen. Hier aber geht es um „stationäre“ Zustände wie zum Beispiel eine stabile Welle. Ist das übertragbar oder muss man den Parameter-Raum verändern? Muss man in die ersten Zeit-Ableitungen wechseln oder reicht die quasi stroboskopisch ermittelte Unveränderlichkeit??
b) Die begrenzte Anwendbarkeit auf „echte“ Oberflächenwellen, die ja „Schwerewellen“ sind, wird aus folgendem Vergleich ersichtlich:


In beiden Fällen sind alle Parameter bis auf die Breite der Start-Funktion (1 zu 10) gleich. Die Ausbreitungsgeschwindigkeit der Maxima ist etwa gleich, die um den „Untergrund“ bereinigte Amplitude ebenfalls. Für Schwerewellen müsste das jedenfalls ganz anders aussehen. Wir müssen also die Komplexität unseres Modells unbedingt erhöhen, wenn wir am Ende Hochwasser-Auswirkungs-Voraussagen treffen wollen!
SCHRITT 2
Jetzt wollen wir einen Übergang zur 2-dimensionalen Transversalwelle schaffen, indem wir Rotatinssymmetrie annehmen. Das führt dazu, dass man die gleichzeitig zu bewegenden Massen konzentrisch linear erhöhen muss. Dann kann man ein Schnittbild erzeugen, das leicht mit den obigen Diagrammen vergleichbar ist.
Im einfachsten Fall der ungedämpften singulären Cosinus-Welle ergibt das schon interessante Effekte:
Quasi-2D-Welle ungedämpft: Die Amplitude verringert sich mit dem Radius und die Geschwindigkeit verringert sich ebenfalls etwas (in gleichen Zeiten wandert der Wellenberg geringere Strecken).

Erhöhte Masse lässt Geschwindigkeit sinken und in der Mitte ein Überschwingen zu, weil hier der relative Unterschied zwischen Nachbarn größer ist. Das Überschwingen pflanzt sich dann fort. Es erinnert an den Start durch fallende Rewgentropfen…

Noch einmal die gleichen Parameter, aber zusätzlich durch Reibung gedämpfte Welle. Die Geschwindigkeit wird duch die Dämpfung nicht weiter verringert, nur die Amplitude!
Parameter an die Diagrammwerte angepasst:

Ausbreitung bis zum „Rand“ fortgeschritten
Start der Ausbreitung: Gegenschwingen gut dargestellt, mit Dämpfung

Start fast ohne Reibungsdämpfung, nur mit 2D-Effekt. Hier ahnt man sogar den Ringwall, von dem Tröpchen abspritzen können.

„Praxis“-Tropfenkrone als Resultat gleichzeitigen Wirkens von Volumen- und Oberflächeneigenschaften des Wassers bei plötzlichem Eintrag kinetischer Energie (aus der Mechatronik-Ingenieurarbeit eines meiner Studenten, Martin Seitler): Die Instabilität deutet sich mit einer Schwingung unterhalb der Krone an. Die tangentiale Gegenbewegung der beiden „Halbtropfen“ führt bbei Impulserhaltung zur radialen Komponente. Die Wassertiefe der „Pfütze“ spielt übrigens eine große Rolle!

Statistischer Zustand von „Halma-Männchen“ (und vorn links sogar auch ein schwebender Tropfen!) neben dem Paddelboot. Die Vorzugsrichtung nach rechts zeigt offenbar die Windrichtung an.
Achtung 1:
Wenn bei Regentropfen „Halma-Männchen“ ausgebildet werden, so spielt auch die gesamte Oberflächenspannung eine große Rolle, die in diesem Modell aber nur radial über die Krümmung, aber nicht tangential wirkt und deshalb auch den blaugrünen Buckel nach dem vierten Zeit-Takt nicht abschnüren kann. Außerdem: Die realen „Männchen“ bilden sich komplett oberhalb des Wasserspiegels aus, weil in der Natur keine Mulde OHNE einen Masse-erhaltenden Ringwall denkbar ist wie hier beim Modell-Start, wo der Ring sich erst durch die Gegenschwingung ausbildet.
Achtung 2:
Hier ist es aber ziemlich schwierig mit der Übertragbarkeit auf eine kreisförmige Schwerewelle: Im Modell ist die Masse radiusabhängig als lineare Funktion mit geringem Offset angesetzt worden, wodurch die Trägheit also mit wachsendem Radius zunimmt. Bei einer Oberflächenwelle unter Schwerkraft (das ist die „Schwerewelle“) sind die Geschwindigkeit und die „Linienmasse“ (man könnte auch die Wellenberg-Querschnitt-Fläche nehmen) amplitudenabhängig und über den Energiesatz (kinetische und potentielle) verbunden, wobei noch eine Kreisbewegung der Teilchen hinzukommt. Die grundsätzliche qualitative Ähnlichkeit beider Bilder ist schön, darf aber nicht zu quantitaiven Vergleichen verführen! (vgl. die rein geometrischen Überlegungen in 2.2 stehende Wellenmuster)
Insbesondere muss man bei Wellen, deren Kopplung komplexer ist als oben beschrieben, zwischen Gruppengeschwindigkeit und Phasengeschwindigkeit unterscheiden, wie man es an Bugwellen (einzelner Wellenberg bewegt sich schneller als die schräg dazu verlaufende Wellenfront)

https://www.wikiwand.com/de/Bugwelle
oder noch besser an unterschiedlich großen Wellen im Meer erkennen kann, wenn man selbst still am Ufer steht:
Eine als besonders großes Individuum erkannte Welle braucht „länger“ bis zu unserem Bauch, als man denkt, weil die am Wellenkamm mitbewegten Augen der Phasengeschwindigkeit folgen, während die Gruppe deutlich langsamer ist. Bückt man sich also zu zeitig zu dem schönen Geschiebe-Stein, weil man denkt, das Monster sei schon vorbei, so überrollt einen dann der später als erwartet eintreffende tatsächlich „Große“ Wellenkamm.
Bei Wikipedia kann man sich das gut vorflimmern lassen:
https://de.wikipedia.org/wiki/Gruppengeschwindigkeit#/media/Datei:Wave_group.gif
Ob das im
SCHRITT 3
mit unseren Ansätzen realisierbar ist? (Nicht als Animation, das wäre leicht, sondern als physikalisches Modell!)
Die Vorüberlegung ist erst einmal, wie sich denn ein Wellenpaket in unseren bisherigen Modellen verhält.
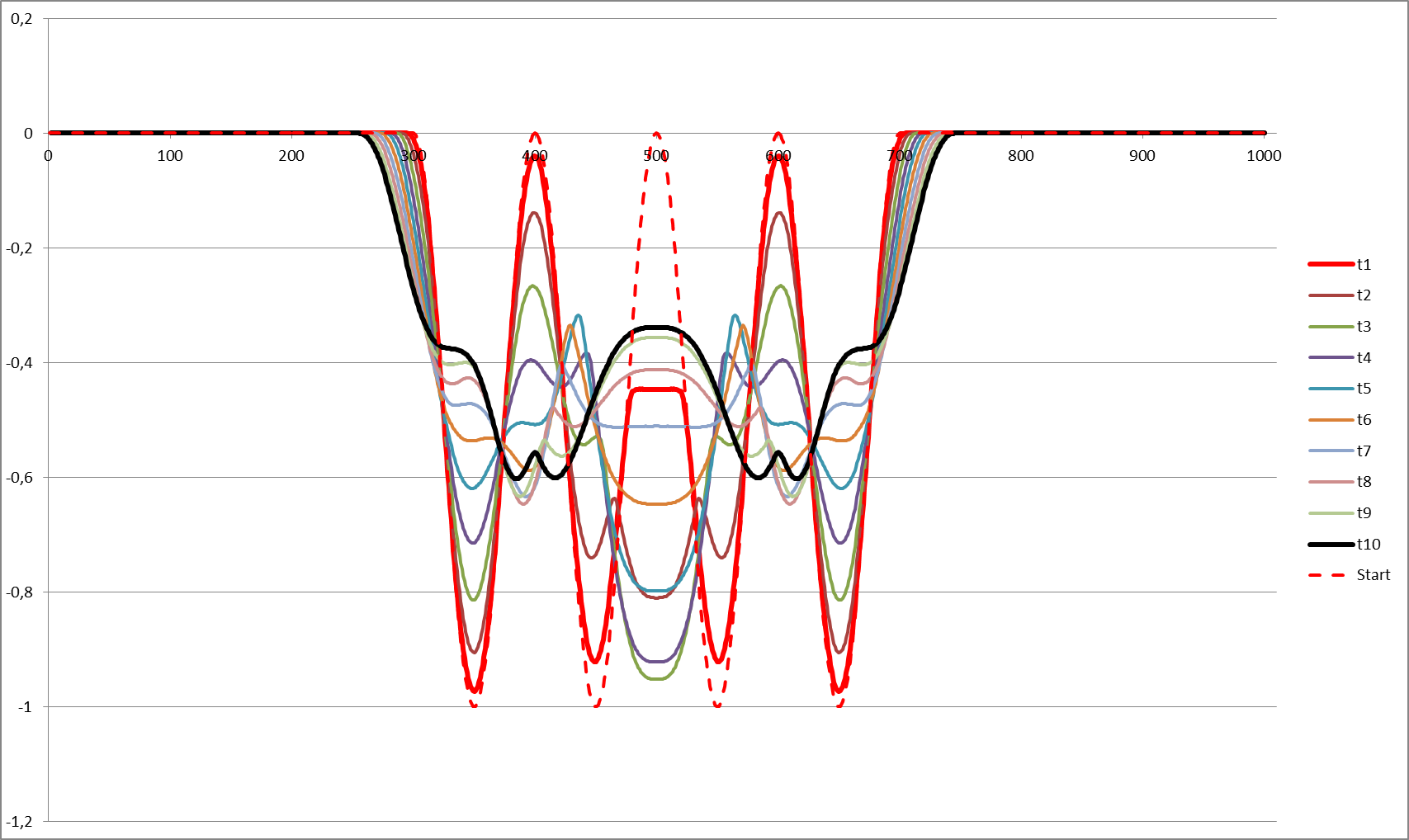
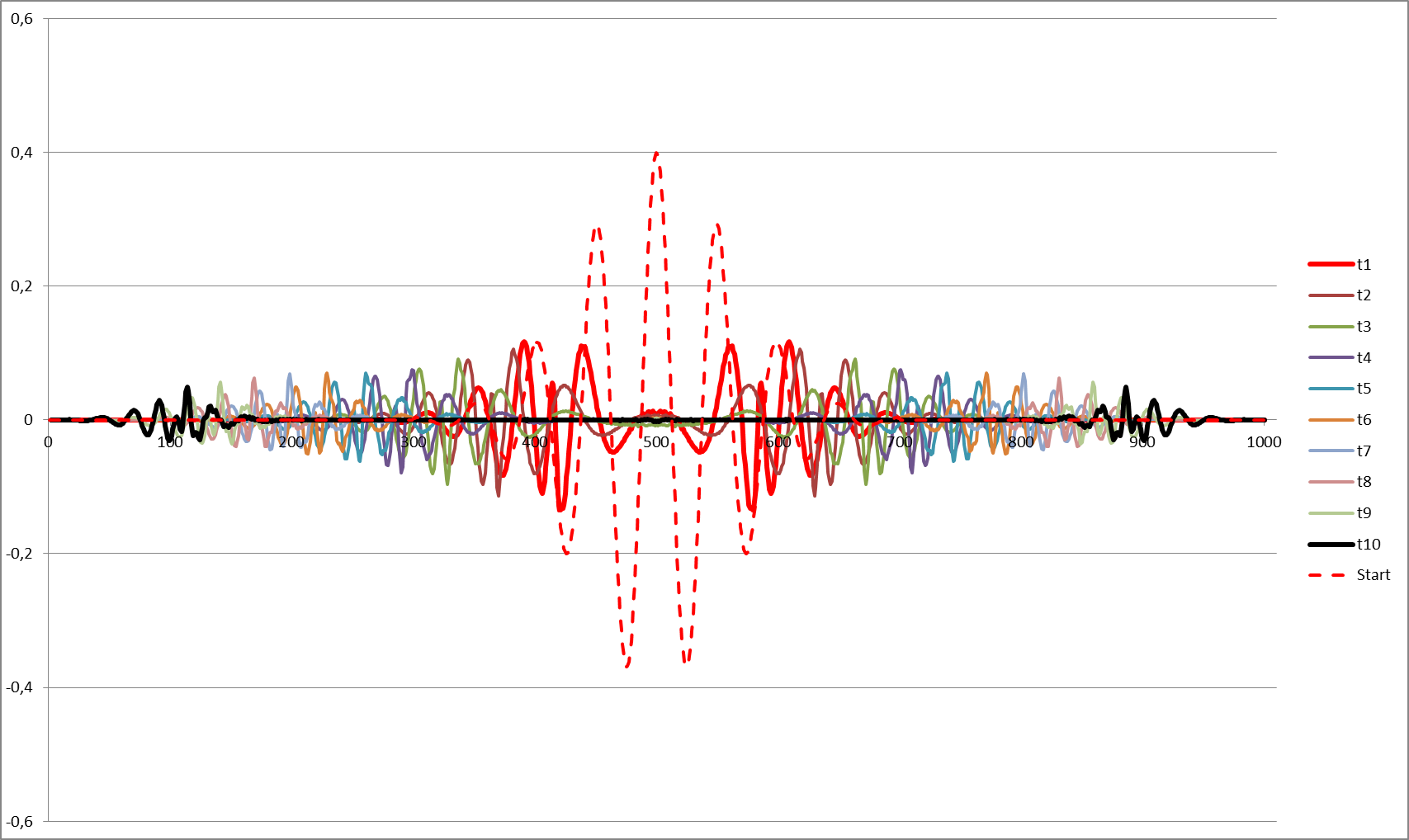
Im 1-dimensionalen sieht es (mit etwas Dämpfung) so aus:

Das Paket aus 7 Bergen läuft in beide Richtungen aus.
Im 2-dimensionalen gibt es einen interessanten Effekt, nämlich eine Art „Schwebung“ in der Mitte des Pakets, die unabhängig von der Zeit und der Dämpfung ist:

Sie tritt auch beim kleinsten denkbaren Paket mit Mittelmaximum (3 Perioden statt 7) auf:

Und sie tritt auch bei geradzahligen Maxima (6 statt 7 ) auf, allerdings als kleine Doppel-Spitze:
Abschließend noch ein Spiel mit 11 Maxima und veränderten Parametern: Hier wird „schon viel geschwungen“, bevor sich die Außenränder nach außen verschieben.

Und bei nur 2 Maxima als Stauchung des Zwischenraums:
Man kann also etwa sagen, dass beide Ränder des Pakets bis nach innen wirken.
Das kann man kurz nach dem Start gut beobachten:
Die radial zunehmende Masseverteilung führt schon zeitig zu einer Überlagerung (zu einem „Einholen“) zweier Nachbarn.
Ein letzter Versuch dieser 2D-Serie sei uns noch gegönnt, nämlich der mit einer Start-Funktion, deren Integral etwa Null ist (wo also keine einseitige Massenverschiebung aus der Waagerechten passiert und es einem Tropfen-Einschlag also ähnlicher wird): Eine günstige Überlagerung von Cosinus- und Gaussfunktion.
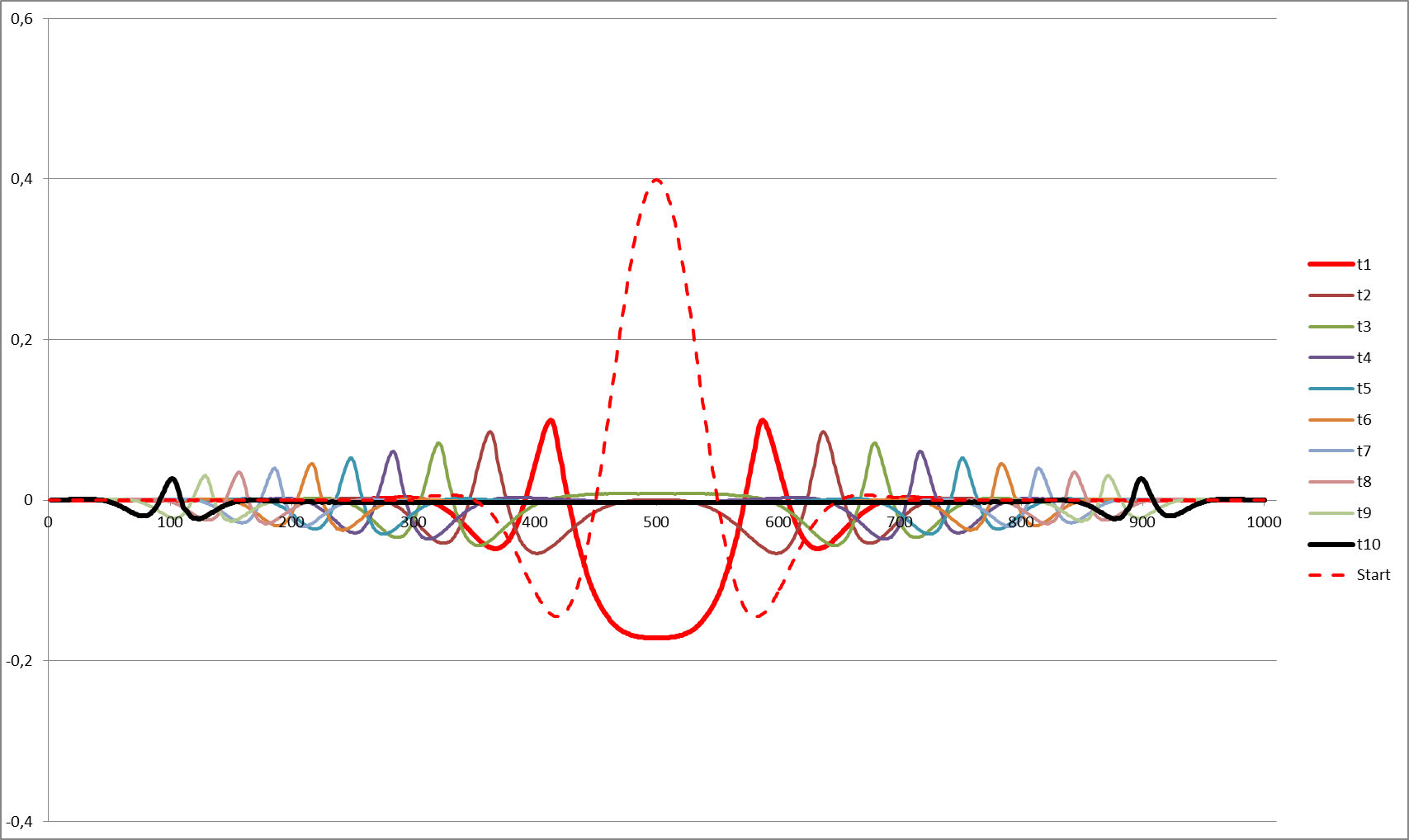
Auch hier teilt sich die Singulariät des Starts („Anfangsbedingung“ für die Wellengleichung) mit dem Überschwingen in zwei auseinanderlaufende Pakete mit Beruhigung in der Mitte!
Mit mehreren Halbwellen ergibt sich wieder eine leichte Paketveränderung beim Auseinanderlaufen.
Hier noch deutlicher: Der schwarze Endzustand zeigt klare Schwebungserscheinungen!
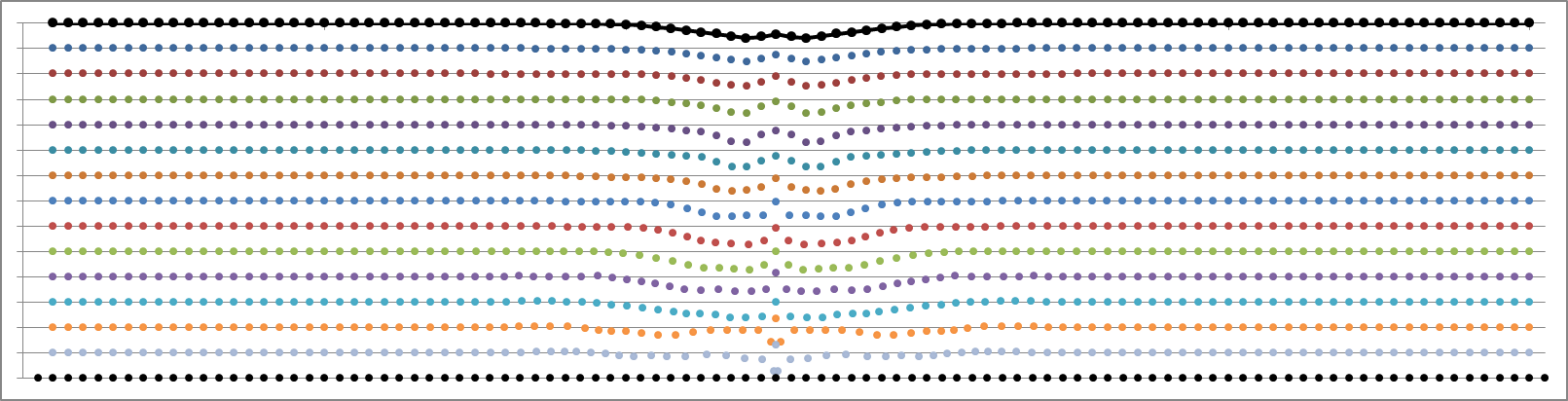
Jetzt soll es aber wirklich schon fast mit dem 3-Dimensionalen losgehen, nämlich eigentlich 2,5-dimensional, wenn man parallele Oberflächen-Wellenkämme in einem elastischen Halb-Volumen-Medium (NICHT Wasser!) modelliert. Alle Teilchen sind jetzt also mit ihren vier Nachbarn elastisch (um einen Sollabstand herum) gekoppelt und ihre Bewegung leicht dämpfbar, um ein Resonanz-Aufschwingen zu verhindern.
Wir fangen vorsichtig an, nämlich mit einem Querschnitt von 101 mal 15 quadratisch angeordneten Massen, wo wieder (hier nur die Mitte der obersten Schicht!) cosinus-förmig eingedellt werden soll.
Schon die Start-Situation des gesamten Schicht-Pakets ist – für mich – schwer zu berechnen, weshalb ich mich wieder gedämpft „heranschleichen“ will, indem ich das iterativ den Rechner machen lasse, bis das schwingende Gezappel der über 1000 Teilchen aufgehört hat.
Das Ergebnis für eine Eindellungstiefe von einer Schicht sieht so aus (wieder etwas überhöht dargestellt):
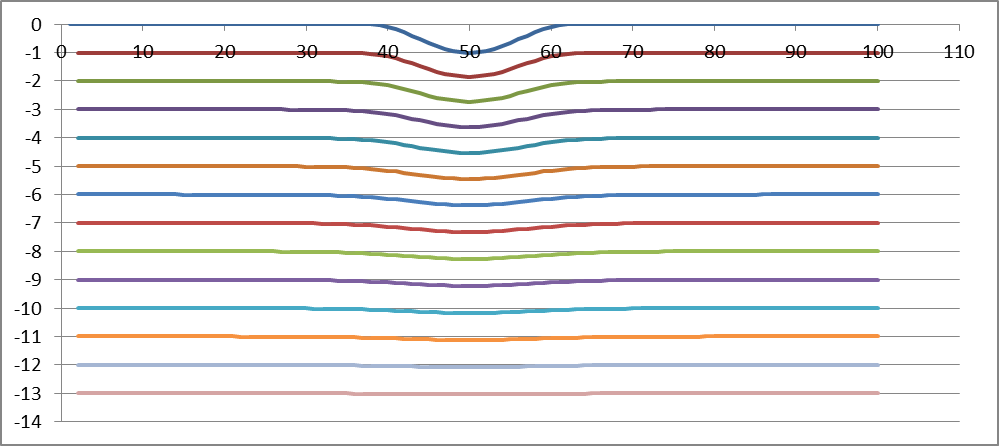
Es entspricht also voll und ganz unserer Bauchgefühl-Erwartung, dass die Dellen nach unten erst etwas breiter und dann vor allem flacher werden müssen: Die Kraft verteilt sich elastisch auf viele Teilnehmer.
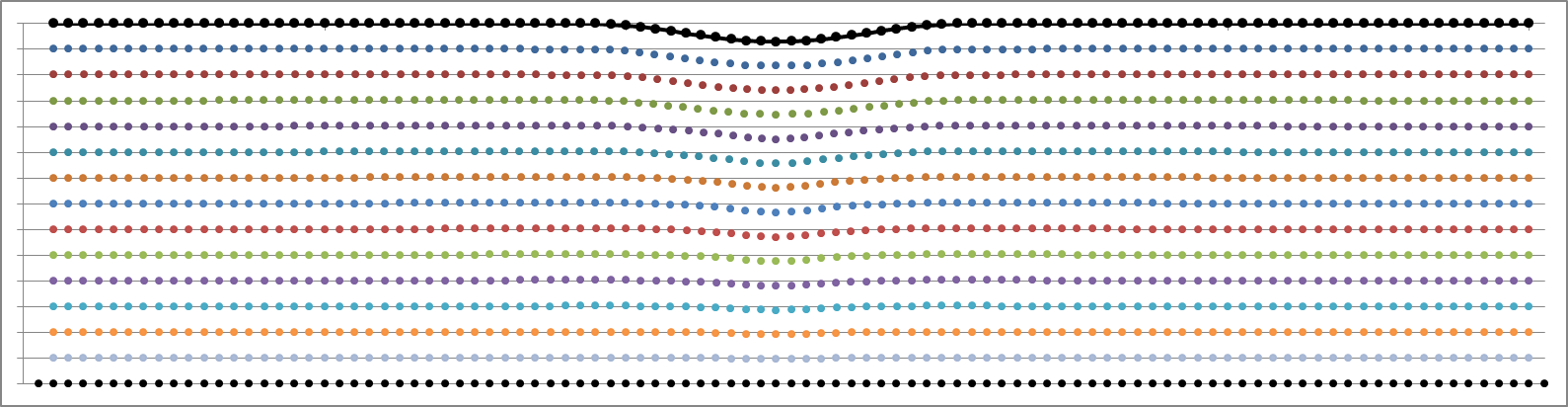
Als nächstes lassen wir oben die Delle los und sehen, was passiert.
Das macht sich in der Darstellung besser mit einzelnen Punkten, aber wieder im überhöhten Maßstab:
Noch einmal der Start:
Und nun eine schrittweise Weiterentwicklung unter allein elastischen Aspekten (allerdings mit einer unumgänglichen Oberflächenspannung!):


Zuerst bildet sich am Boden eine reflektierte Welle aus, die dann bis nach oben durchdringt und sich sogar in der Mitte zu einer kleinen Spitze wölbt. Wer hätte das so gedacht?
Ob auch eine Oberflächenwelle entsteht, die sich seitlich ausbreitet? Man müsste mehr Zeit vergehen lassen.
Bei einer passenden Wahl von Federkonstante und Dämpfung erhält man den folgenden weiteren Ablauf zum Beispiel:



Die Welle läuft tatsächlich nach außen und wird dabei von der Dämpfung (wie etwa bei einer etwas zäheren Flüssigkeit) absorbiert. Wunderbar! Man sieht auch, dass der Untergrund kräftig mitmischt, denn alle Teilchen können sich nun in sämtliche Richtungen (in der Schnittebene) bewegen und tun das auch, wie die Koordinaten-Tabelle, die Grundlage für das Diagramm ist, zeigt!
Ich bin völlig happy und lasse das erst einmal sacken!
Bis später…
Da bin ich wieder. Man muss natürlich die Grenzen seines Modells austesten, damit man weiß, wie sehr man den Ergebnissen trauen kann. Folgende Besonderheiten traten auf:
Ebenen-Verschmelzung
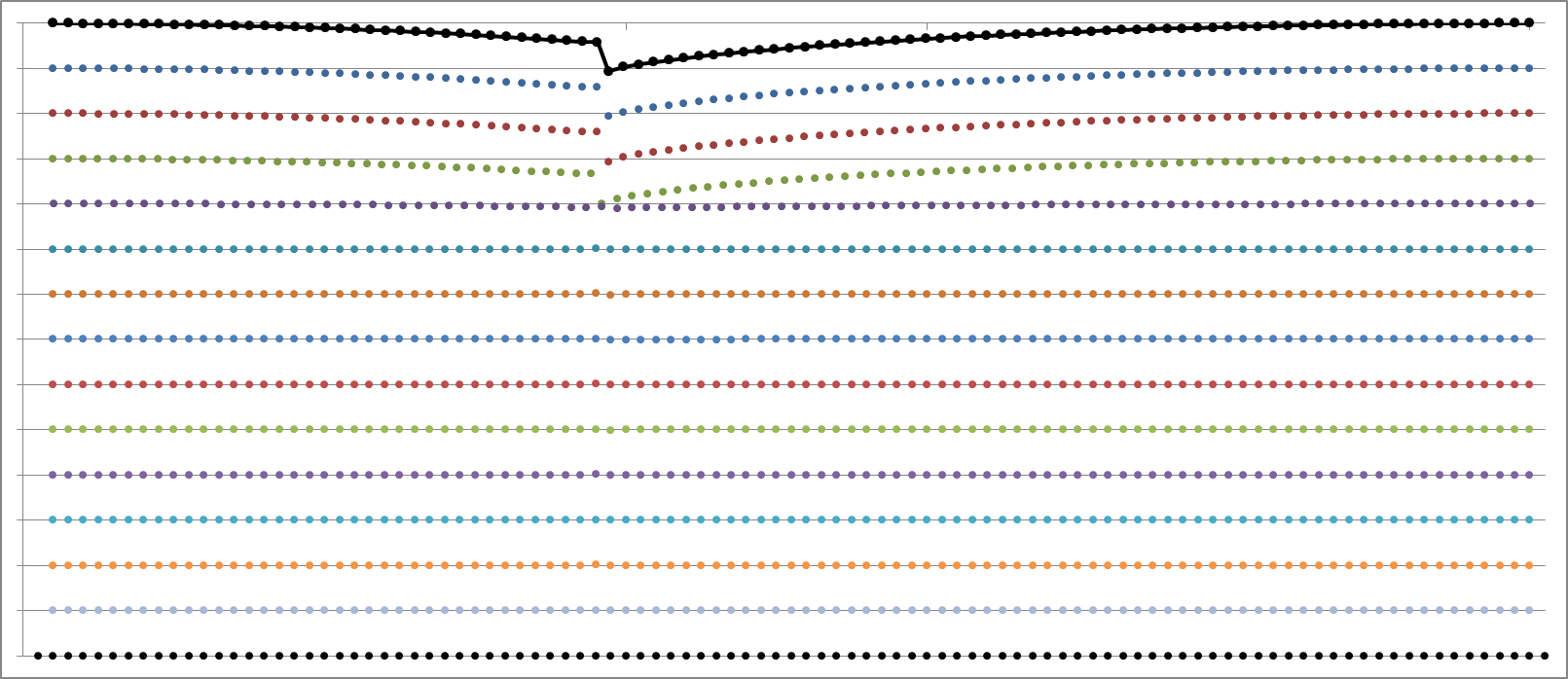
„Stabile“ Stufenversetzung
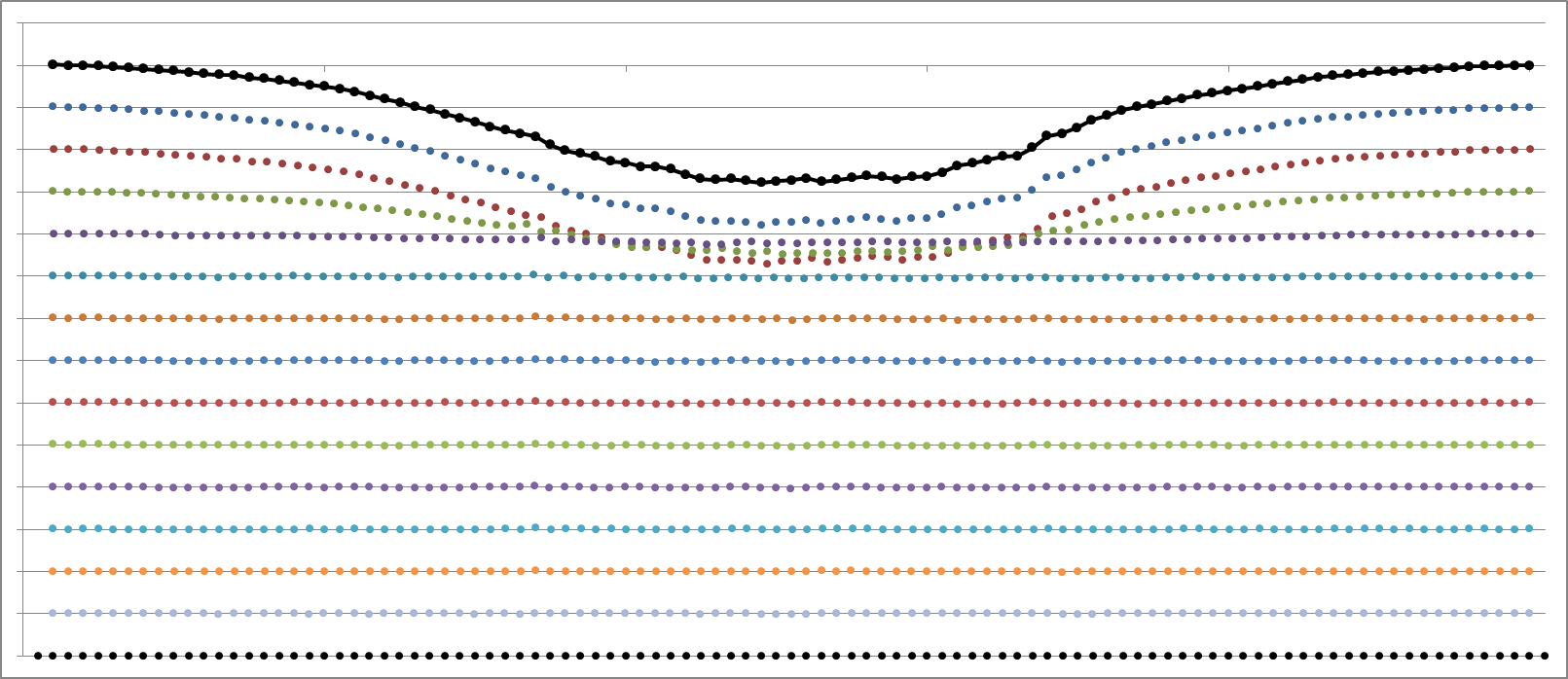
Beides sollte nach kurzer Überlegung unmöglich sein, blieb aber stabil. Die Stufenversetzung verschwand, als ich die Anfangs-Störung exakt in die Mitte gesetzt habe (sie war 1 Position links der Mitte angesetzt). Sie war also ein Ergebnis unterschiedlicher Reflexionen an den Wänden rechts und links. Aber wieso blieb sie über einzelne Perioden oder aber auch über Hunderte Perioden stabil?? Die Ebenen-Verschmelzung liegt am unglücklichen linearen Elastizitäts-Ansatz für Dehnung und Stauchung der Abstände und ihrer Überlagerung für nur die nächsten vier Nachbarn. Dem kann durch Erhöhung der Federkonstante und Erhöhung der Dämpfung entgegengewirkt werden. Am Ende sieht es symmetrisch wie gemalt aus:

Symmetrischer 3-Wellen-Start (elastisch 500 Takte ausgeglichen)

Ausgleich nach 100 Takten ohne äußere Kraft

Ausgleich nach 200 Takten
Ausgleich nach 500 Takten
Nun erkennt man deutlich, dass dieses Modell NICHT taugen kann, um Oberflächenwellen (Schwerewellen) eines flüssigen Mediums zu studieren, wenn man lediglich den Startort (und damit die Kräfte) als Anfangsbedingungen festlegt, aber alle Anfangs-Geschwindigkeiten mit Null ansetzt.
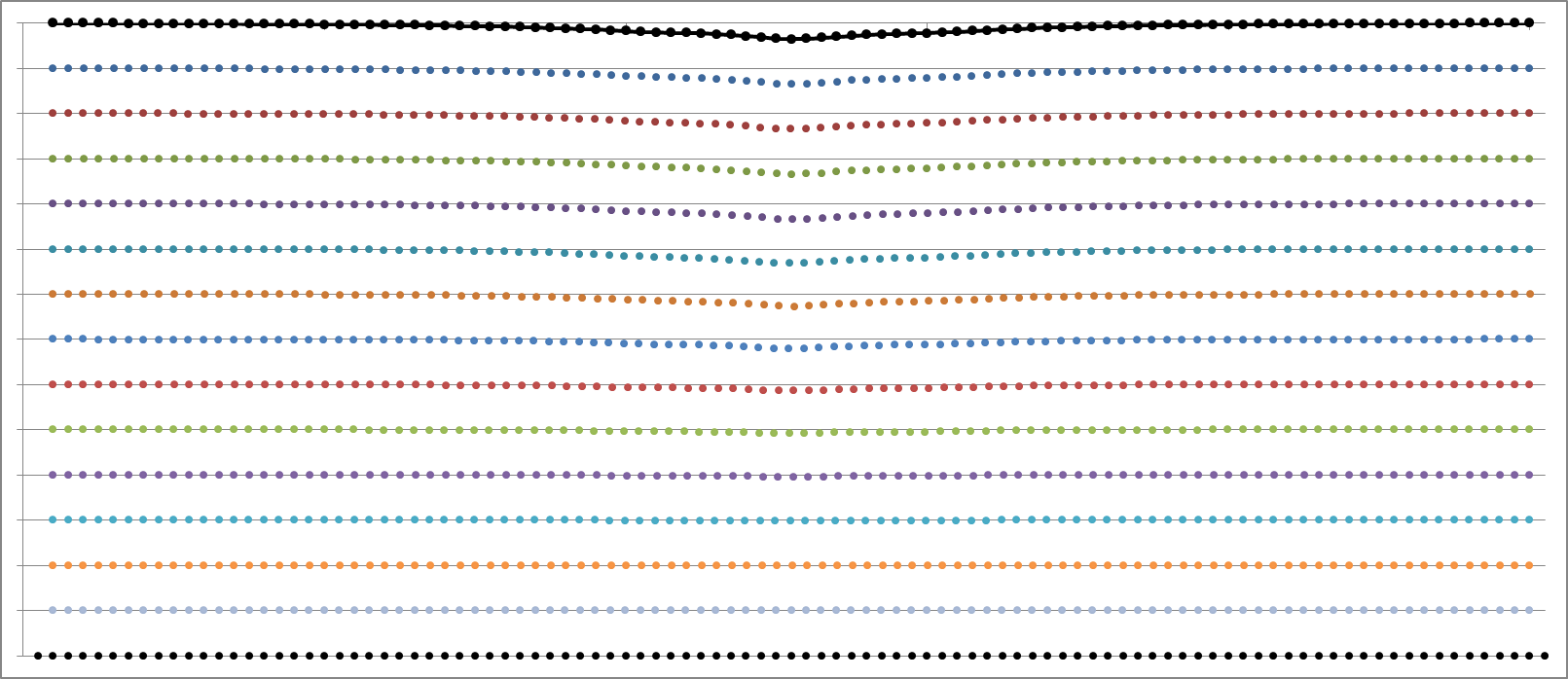
Wir prüfen das auch noch einmal mit einer Gauss-Verteilung der periodischen Anfangs-Auslenkung:
Stehender Start der Gauss-Verteilung
Die weitere Entwicklung zeigt ein elastisches Schwingen bis zur „Reflexion“ unten und an den Seiten, wobei die Energeiverteilung beider Komponenten wandert (nur der elastische Anteil ist im Bild durch die Auslenkung zu sehen; für den kinetischen müsste man eine Überlagerung zweier benachbarter Takte erzeugen).
Hier eine winzige Auswahl dreier Bilder im Abstand von je 5 Takten, die zeigen, dass die Schwingung an der Oberfläche anders verläuft als in der Tiefe:

T 150
T 155
T 160
Man kann mit der Erhöhung der Federkonstante und der Verringerung der Dämpfung kurz vorm Überschwingen noch eine geringe Verbreiterung des Störungs-Verlaufs erkennen, aber keine Wellenbewegung.
Auch das ist eine physikalische Erkenntnis, dass ein Ansatz nichts taugt. Nun kann man weiter forschen und den Ansatz verändern. Aber das ändert nichts an der Tatsache, dass eine lineare Kette von Schwingern einen echten zusätzlichen Freiheitsgrad im Raum besitzt, um erstens den Wechsel von kinetischer und potentieller Energie zu gestalten und darüber zweitens eine Kopplung von zweiter zeitlicher und zweiter räumlicher Ableitung herzustellen.
Eine kleine Prüfung sei nnoch erlaubt, nämlich die Schrittweite der numerischen Integration deutlich zu verkürzen (erhöht die Rechenzeit gewaltig). Wenn sich dann nichts tut, war es die Physik, ansonsten die Numerik!

Nun könnte man sich also doch einbilden, dass sich da etwas ausbreitet… Aber man erkennt schon, dass man für die weitere Verfolgung dieses Themas einen größeren Rechner braucht!
Doch nebenbei haben wir festgestellt, dass diese „inneren Longitudinalwellen“ zwischen Oberfläche und Boden und reflektiert zurück sehr gut funktionieren, nämlich beim Start mit der aufgeprägten Oberflächen-Störung: Das wären sozusagen Schallwellen! Und sie breiten sich viel schneller aus. Man kennt das auch von den Erdbeben, wie ich mal 1992 eines an der Rur erlebt habe: Erst kam das seitliche Schwanken, das mich schon aus dem Bett trieb, dann erst das senkrechte Rattern.
Könnte man das Dilemma überwinden, indem man die Auslenkung aus der „Schnittebene“ in die dritte Dimension vonstatten gehen lässt und also eine transversale Flächen-Schwingung erzeugt? Ja, sicher, aber das hatten wir als Schnitt schon oben in der schwingenden Kette oder als Kreiswelle schon mit radial wachsender Masse…
Die andere Variante wäre, wie oben schon angedeutet, Anfangsbedingungen zu wälen, die auch „seitliche“ Geschwindigkeits-Komponenten enthalten, die einer Schwerewelle entsprechen. Und man müsste die Schwerkraft überhaupt hinzunehmen, vielleicht erst beides einzeln und dann zusammen?
Das wäre immerhin ein Plan…
(Fortsetzung kommt? Erst wieder nachdenken und Algorithmen optimieren…)
Kommentar abgeben