2.8.6.1 Das Doppel-Pendel als „Chaot“
Gelingt es auf einfache Weise, die Bewegung eines Doppelpendels zu beschreiben und zu modellieren?
Es klingt ja wirklich einfach:
Das obere Pendel hängt an einem Punkt und beschreibt garantiert einen Kreisbogen.
Das untere Pendel hängt am oberen Pendel und beschreibt um dieses (also im mitbewegten Bezugssystem!) ebenfalls einen Kreisbogen.
(Man merkt, dass hier vorausgesetzt wird, dass die Pendelstangen starr sind, also keine Fäden sind, bei welchen sich die beiden Massen ja aufeinander zubewegen könnten.)
Als äußere Kraft wirkt allein die Schwerkraft, die auf bewährte Weise als konstant in Betrag und Richtung angesetzt wird.
Im Inneren wirken aber noch Trägheitskräfte, die von den Massen abhängig sind.
(In der Schule haben wir einmal richtig gelernt, dass man beim einfachen Pendel die Masse herauskürzen kann, weil sie als schwere und als träge Masse auftritt.)
Die obere Masse m1 wird also von ihrer eigenen Schwerkraft nach unten gezogen und sowohl von der Schwerkraft der unteren Masse als auch von deren Trägheitskraft („Fliehkraft“) beeinflusst. Es gibt sozusagen eine „Rückwirkung“.
Kann man sich vorstellen, was alles passieren kann?
Dazu machen wir zwei Grenzüberlegungen:
1. Die obere Masse geht gegen Null, die untere dominiert das System.
Die Schwingzeit eines idealisierten Pendels (nämlich mit kleinen Auslenkungen aus der Ruhelage, für die man sin(phi) = phi setzen kann) hängt von der Stablänge ab, das weiß man. Selbst wenn beide Stäbe gleich lang sind, hat das untere Pendel sozusagen zwei Schwingzeiten: Eine bezüglich der oberen Pendelmasse und eine bezüglich der oberen Aufhängung. Wenn beide die gesamte Zeit „in Linie“ bleiben sollten, müsste die obere Masse verschwindend klein sein, also am besten gegen Null gehen, also am allerbesten gar nicht vorhanden sein. Dann wäre es eben nur ein langes Pendel. Man merkt schon, dass im Falle einer sehr kleinen oberen Masse diese immer durch die untere „straff“ gezogen werden würde, was ein schnelles Zittern zur Folge haben könnte.
2. Die untere Masse ist sehr klein.
In diesem Fall kann man sich vorstellen, dass sie von der oberen hin- und hergeschleudert wird und durch ihre Trägheit sogar über die obere Masse hinwegschwingt. (Konstruktiv müsste das so gelöst sein, dass beide Masen in dicht nebeneinander parallelen Ebenen schwingen. Mit physischen Pendeln statt unserer Punktmassen ließe sich das annähernde lösen.) Dann kann man sich aber ebenso vorstellen, dass sie kurz im labilen Gleichgeicht ist und die weitere Bewegungsrichtung („rechts“ oder „links“) von winzigen Bruchteilen der Anfangssituation abhängig ist, also „chaotisch“ wirkt. (In der realen Welt gibt es immer Reibungen, die zu eben jenen „chaotisch“ wirkenden winzigen Unterschieden führen können.)
Also, los, probieren wir zu rechnen!
Will man das alles gleichzeitig berechnen, kann man schnell ins „Gedanken-Chaos“ geraten, was man spätestens beim Betrachten der errechneten Trajektorien sieht. Deren Chaos nimmt man ja eigentlich gelassen hin, da man es ja erwartet hat, aber wenn in leicht auszudenken Spezialfällen immer noch Chaos herrscht, wo es einfach sein sollte, dann muss etwas falsch sein.
Wir brauchen also einen allgemeineren Ansatz als die momentan wirkenden Kräfte, Zwangskräfte usw. usf.
Dieser allgemeinere Denk-Ansatz beruht auf dem Energie-Satz, den man mit den geometrischen Bedingungen des Systems so koppelt, dass man als Variablen diejenigen nimmt, die den Randbedingungen entsprechen: Hier sind es die oben erwähnten Kreisbögen, die sich überlagern, weshalb die Variablen des Systems also Winkel sind. Massen und Stangenlängen (die Stangen werden als masselose Stäbe gadacht) sowie Anfangs-Winkel und Anfangs-Geschwindigkeiten bestimmen den Start der Integration.
Aber welchen Gleichungen muss das System nun genügen?
Vor über 200 Jahren hat Lagrange die Idee gehabt, kinetische und potentielle Energie zu verwenden, um ein System zu beschreiben, das in einem Potential ohne weiteren äußeren Einfluss in Bewegung ist. (Das kann das Schwerefeld sein oder auch ein elastische Potential durch Federkräfte o.a.m.)
Die sogenannte Lagrange-Funktion ist dann
L = Wkin – Wpot
und soll dann für jede Koordinate einzeln der Bedingung
d/dt(dL/dqi‘) – dL/dqi = 0
genügen.
Damit erhält man ein gekoppeltes Differential-Gleichungs-System, das i.a. nur numerisch zu lösen ist.
(Herleitung mit etwas Geduld nachzuvollziehen in etlichen Skript-Links, was ich hier nicht wiederholen möchte. Achtung: Auch dort sind nicht alle Filmchen echte Modellierungen, sondern oft nur Animationen!)
Bei der Numerik passieren dann die zu erwartenden Effekte:
Für sehr kleine Massen werden die Beschleunigungen und die Geschwindigkeiten so groß, dass der Stützstellen-Abstand zu klein ist, um Artefakte auszuschließen: Das System schwingt numerisch zur Katastrophe auf. (Für eine der Massen gleich Null aber ist es stabil!)
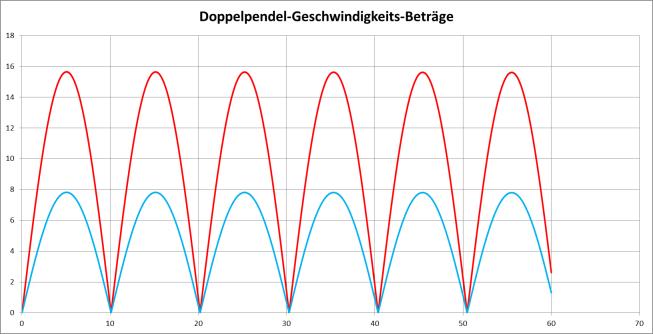
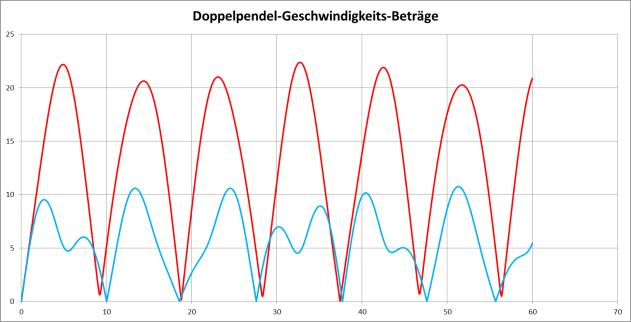
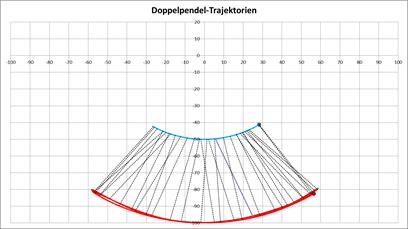
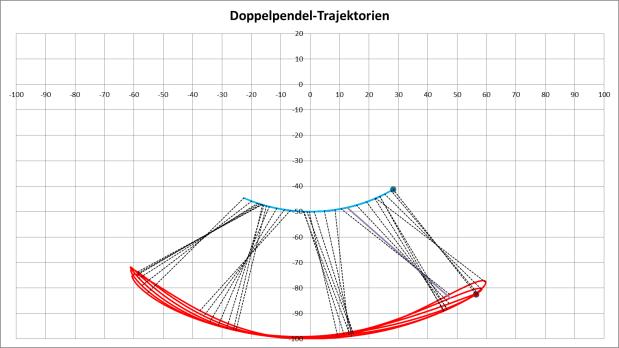
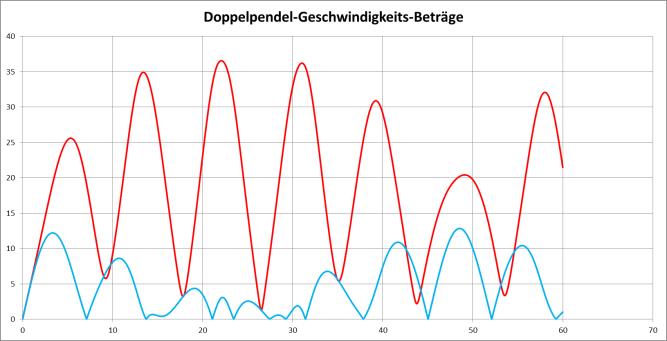
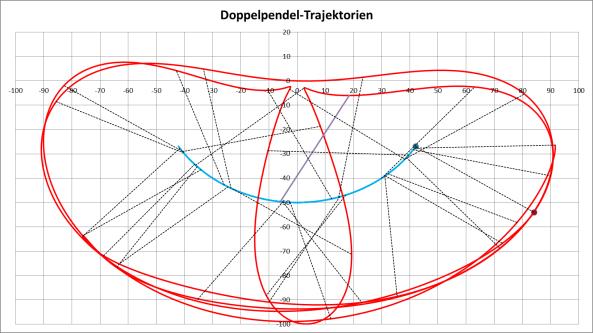
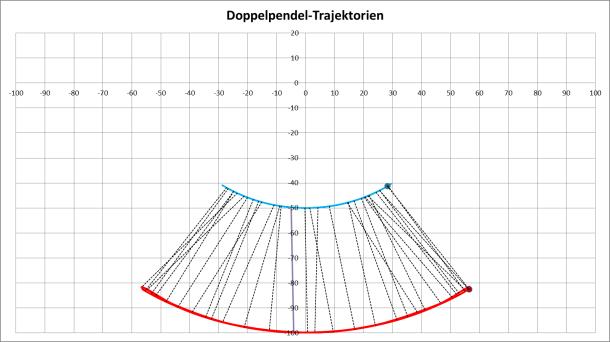
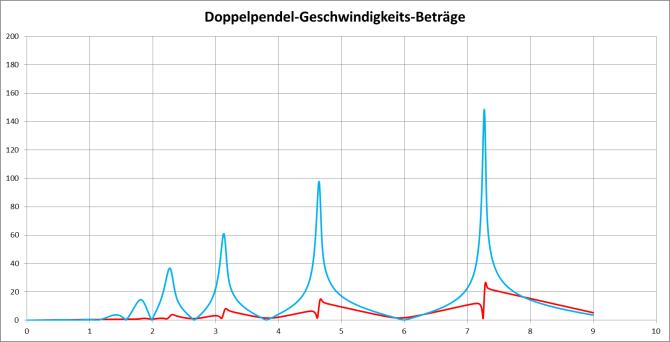
Für ein Doppel-Pendel gleicher Stab-Längen sehen Geschwindigkeit-Plots und Trajektorien-Spuren dann so aus (Start-Punkte der Pendelei rechts eingezeichnet, einige Verbindungslinien im gleichen Zeitabstand ebenfalls: 30 mal 1000 Numerik-Takte mit der – für die Artefakte günstigen – relativ ungenauen Rechteckmethode):
Ohne Innenmasse wie Fadenpendel

Streifen-Muster je nach Ober-Taktlänge
Zwei gleich Massen
Massen 2:1
Massen 6:1

Massen 20:1

Massen 50:1
Man sieht, dass bei sehr großer Innenmasse das äußere Schleudern wenig Einfluss auf Innen hat.
Natürlich lassen sich Bedingungen einstellen, bei denen auch interessante „Über-Strukturen“ entstehen, um die es in diesem Abschnitt neben dem „Chaos“ ja auch gehen soll:

1 : 1,45

1 : 5,15

1 : 10,7

1 : 2,7

1 : 0,86

Und hier das oben erwähnte „numerische Artefakt“-Aufschwingen für sehr kleine Innen-Massen:
1 : 1000
Dieses herrliche Spiel (sogar in EXCEL ohne VBA machbar) trägt weiterhin dazu bei, die „Eigenwert“-Pakete der Parameter definierter endlicher stetiger schwingender Systeme als Pendant zur Quantelung zu sehen, die ihrerseits als Erscheinung „stehender Wellen“ zu verstehen ist (mitsamt der zeitlichen Entartung des „chaotischen“ statistischen Zerfalls).
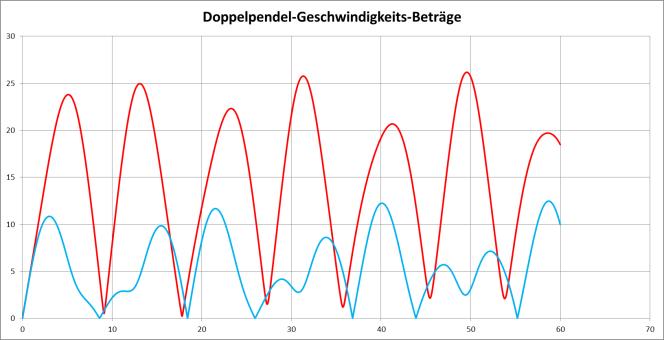
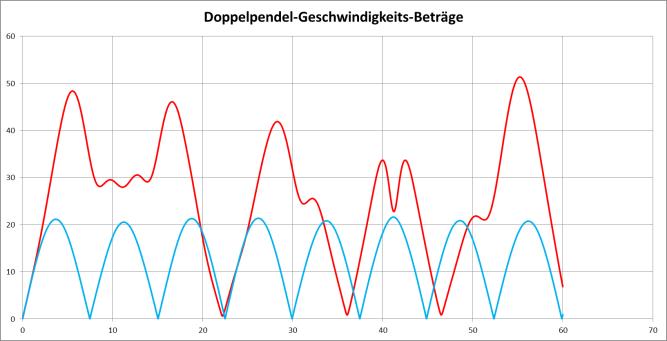
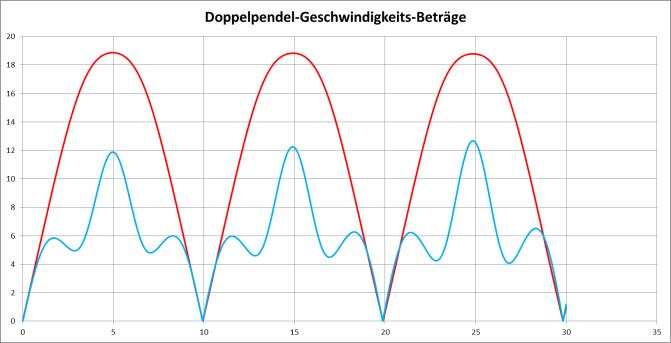
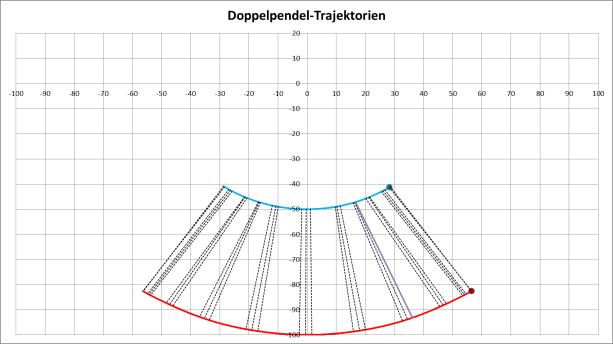
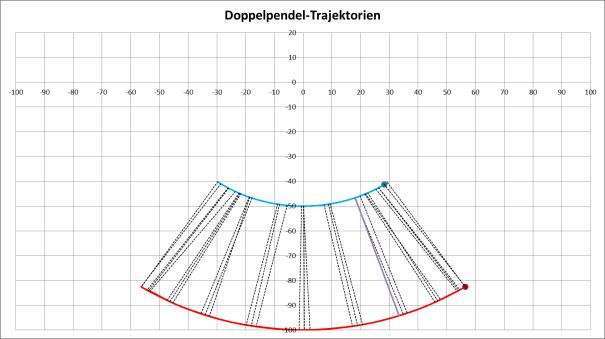
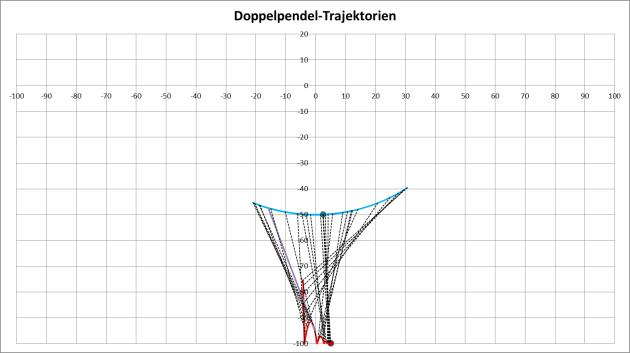
Fügt man eine variabel einstellbare „Dämpfung“ der Bewegung ein (proportional zur Geschwindigkeit und umgekehrt proportional zur Masse), so kann man mit größerer Sicherheit echte „Umkehrpunkte“ erzeugen, in denen die äußere Masse kurzzeitig labil ruht:
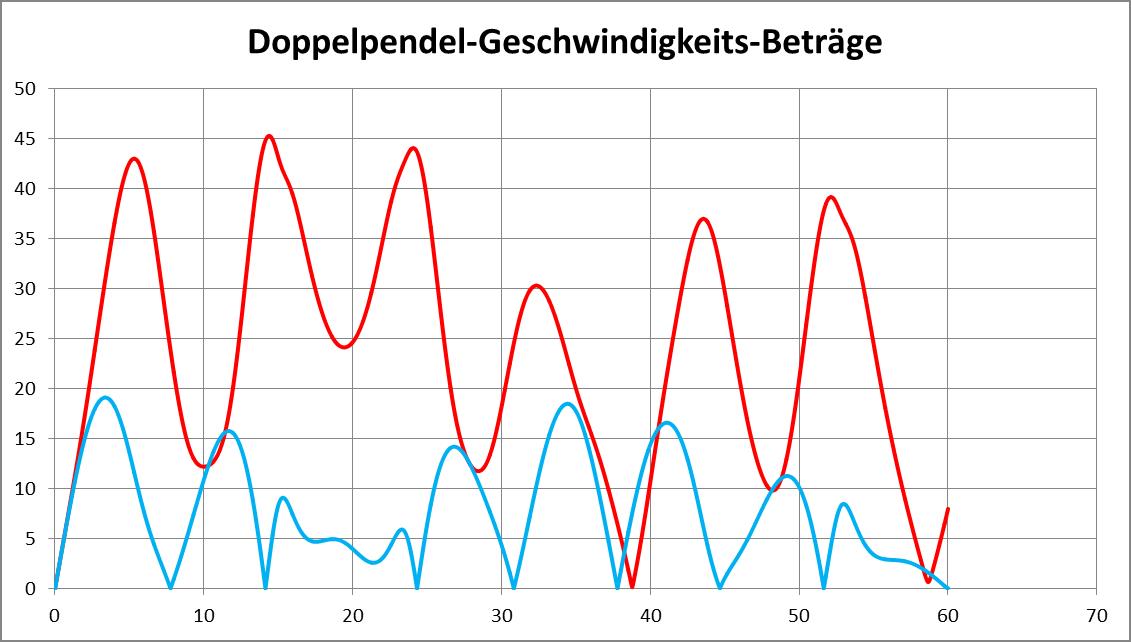
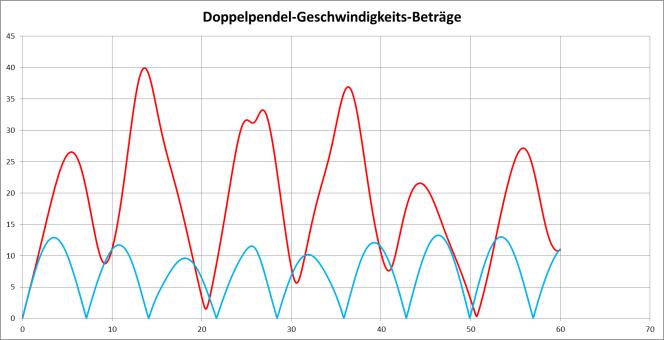
äußere (rote) Geschwindigkeit zweimal verschwindend klein in labilen „Chaos“-Punkten

„Chaos“-Schleudern gut zu erkennen
(Eine weitere Steigerung zum dreifach-Pendel bringt zwar Spaß, aber keine weiteren grundsätzlichen Erkenntnisse.)
Die Betrachtung der anderen Parameter des Systems wie potentielle und kinetische Energie, Winkelgeschwindigkeit oder Winkelbeschleunigung bringen weitere interessante Zusammenhänge ans Licht, spielen hier aber keine Rolle für die Erkenntnis, was „Chaos“ in einem determinierten stetigen Zustandsraum bedeutet.
(Vergleiche auch die interplanetaren Reisen!)
Kommentar abgeben